
「良い制御」って何?制御の評価ってどこを見ればいいの?
という疑問にお答えするため、このページでは、基本的な制御性能の評価基準について説明します。
制御性能は以下を基準に評価すればよい!
- システムの安定性
- 追従精度
- 応答速度
- オーバーシュート・アンダーシュートの有無
- 外乱への感度
- 特性変動への感度
評価基準1:システムの安定性
「システムが安定である」とは、一言でいうと「ほっといても暴走しない」ことを意味します。

当然、これは制御システムに求められる最も基本的な性能です。ただ、制御対象が本質的に不安定である場合は、実現が難しかったりします。

※システムの安定性の詳細については、こちらのページをご覧ください
評価基準2:追従精度
出力(制御量)が目標値に精度良く追従することも重要です。このために制御しているので、これも当たり前ですね。
正しく設計されなかった制御器は、次のように出力が永遠に目標値にたどり着けない定常偏差を生み出すことがあるため、注意が必要です。

※定常偏差とその取扱いについての詳細は、こちらのページをご覧ください

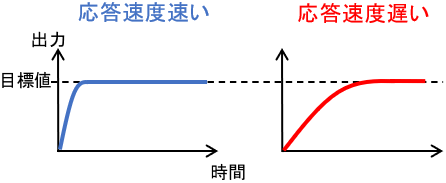
評価基準3:応答速度
目標値の変化に対して素早く反応することも重要な性能です。いくら最終的な追従精度が良くても、それに至るまでに時間がかかっては意味がありませんからね。
ちなみに教科書などでは、応答速度の指標が次のように紹介されていることがあります。
- 立上り時間:ステップ応答が、定常値の10%から90%になるまでの時間
- 遅れ時間:ステップ応答が、定常値の50%になるまでの時間
- 行き過ぎ時間:応答が最初のピークに到達するまでの時間
- 整定時間:応答が定常値の±2%の範囲に収まるまでの時間

※ステップ応答の概要については、こちらのページをご覧ください

それぞれの用語の概念を知っておくことは重要ですが、「○○%になるまで」といった数値は覚える必要は全くありません。実用シーンでは、対象とするシステムに応じて「どこをどう見るべきか」は様々に変わるためです。
例えばものづくりにおいては、製品に応じて「動作のどの部分が重視されるか」が様々に変わりますよね。よって、見るべき範囲は対象に応じて柔軟に変更しましょう。
評価基準4:オーバーシュート・アンダーシュートの有無
制御器の設計が不適切であると、次のようにオーバーシュートやアンダーシュートが発生する場合があります。

「三歩進んで二歩下がる」「二歩下がって三歩進む」といった挙動をされては、いくら追従精度・応答速度がよくても困りますよね。これらをしっかりと防ぐのも重要です。
※オーバーシュート・アンダーシュートは、システムの零点と密接な関係を持っています。詳しくは、こちらのページをご覧ください。

評価基準5:外乱への感度
現実のシステムには、基本的に予期しない外乱が入ります。外乱の影響を大きく受けるシステムは「外乱への感度が高い」、その逆を「外乱への感度が低い」といいます。
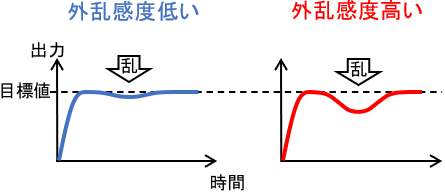
制御設計時は、ある程度の外乱はものともしない(つまり外乱への感度が低い)システムを構築することが重要です。
※外乱とその取扱いについての詳細は、こちらのページをご覧ください

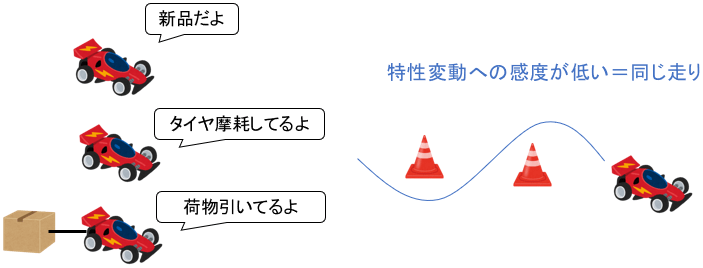
評価基準6:特性変動への感度
動作条件の変化や経年劣化により、システムの特性が変わることもよくあります。外乱と同じく、その影響の大小を「特性変動への感度が高い/低い」といいます。
当然、特性変動が生じても制御性能が変わらない(つまり特性変動への感度が低い)システムを構築することが重要です。
以上、基本的な制御性能の評価基準についてご紹介しました。
上記全てを満たすことは結構難しいので、実際はシステムの用途や使用環境に応じて満たすべき性能を取捨選択することも多いです。対象とするシステムに合わせて、柔軟に評価してくださいね!
※こちらのページでは、制御性能が不十分であった際、その原因を分析するコツを解説していますので、合わせてご覧ください。

制御性能は以下を基準に評価すればよい!
- システムの安定性
- 追従精度
- 応答速度
- オーバーシュート・アンダーシュートの有無
- 外乱への感度
- 特性変動への感度
コメント
いつもお世話になっております。
大学で制御系の講義を受講している、なみりあと申します。
スマホでもPCからでもとても見やすいレイアウトである上、内容も理解しやすくまとめられており、平素よりとても助かっております。
この度は、こんなにも楽しく学べるこんとろラボさんが、何を情報源としているかが気になったため、ご連絡差し上げました。
ことアンダシュートに関しては資料によって複数の解釈が散見されるため、講義内容との整合を図るためにも是非教えていただきたく存じます。
もうどこかにまとめてあるよ、等ありましたら申し訳ございません。
よろしくお願いします。
コメントいただき、ありがとうございます。励みになります。
情報源についてですが、全ての拠り所となるような参考書があればよいのですが、制御工学は広い分野なので「とりあえずコレとコレ見とけばOK!」と言えるものが無いのが現状です。
サイト内の各ページは、トピックに対して国内外の参考書&論文と、自身の経験から得た知識をまとめて書いております。
なので具体的に回答できないのが心苦しいですが、日本語の情報は吉川恒夫先生と杉江俊治先生の文献を参照することが多いですので、参考になればと思います。
アンダーシュートについては、確かに人によって定義や解釈が曖昧な部分はありますね。(制御用語はそういうの割とある印象)
求めている回答になっているかわかりませんが、本サイトでの解釈は下記文献にならっています。
https://people.duke.edu/~hpgavin/SystemID/References/HoaggBernsteinNonMinimumPhaseZero-CSM-2007.pdf
結局このような用語は、絶対的な定義が無い場合も多いので、実用上必要な場合は「本議論(or本発表/本文献)では、〇〇のことを△△と呼ぶ」と自分で定義してから議論を進めることが多いように思います。
ご回答いただきありがとうございます!
お返事が遅くなってしまったこと、申し訳ございません。
自分の環境との差異は適宜変換してこんとろラボさんを読むことができるよう、一層勉強して行きたいと考えております。
今後ともよろしくお願いします!
わざわざ返信いただきありがとうございます。
また不明点がありましたら、お気軽に質問してくださいね。(よりよいコンテンツ作成のヒントにもなりますので)