
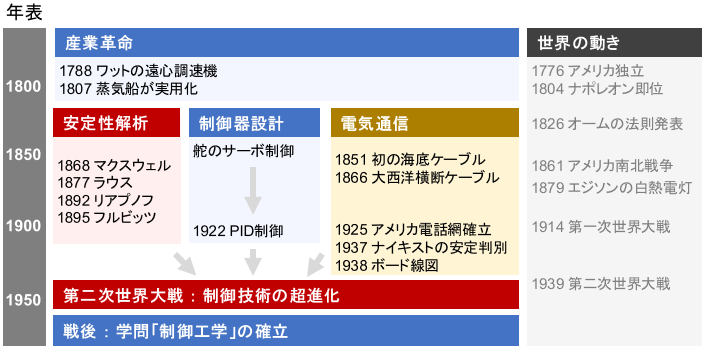
制御工学は今や立派な学問ですが、その起源や進化の過程が超おもしろいことはご存知ですか?
このページでは、制御工学の元祖である古典制御の歴史についてご紹介します。技術の背景にある歴史を知ると、その思想をより理解できるようになりますよ!
産業革命以前:制御がノウハウだった時代
まずは制御工学の代表手法である、フィードバック制御の源流を見ていきましょう。フィードバック制御は、「制御対象の状態に応じて制御入力を自動的に調整する制御方式」です。
その昔のフィードバック制御システムは、「足りなければ入力を大きくし、行き過ぎたら入力を小さくする」という単純な機構に基づくものでした。その代表的な例を見ていきましょう。
※フィードバック制御の詳細については、こちらのページをご覧ください

紀元前:水時計
太古のフィードバック制御システムとして有名なのが、紀元前3世紀のギリシャで用いられていた水時計です。水時計は次のような機構で水を溜め、溜まった水の量で時間を計る装置です。
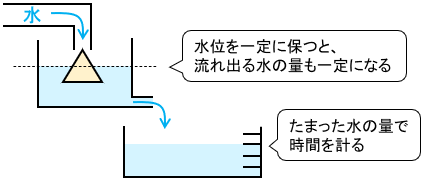
水が溜まるスピードを一定にするためには、1段目のタンクの水位を一定に保つ必要がありました。そのため三角錐型の「浮き」によって、下図のような機構で水の量が調整されていました。

この水時計、17世紀に振り子時計が登場するまでは、この世で最も精度のよい時計だったそうです。意外とすごいですね。
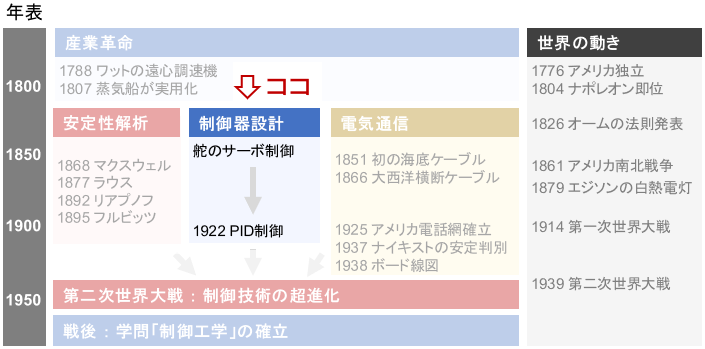
1788年:ワットの遠心調速機
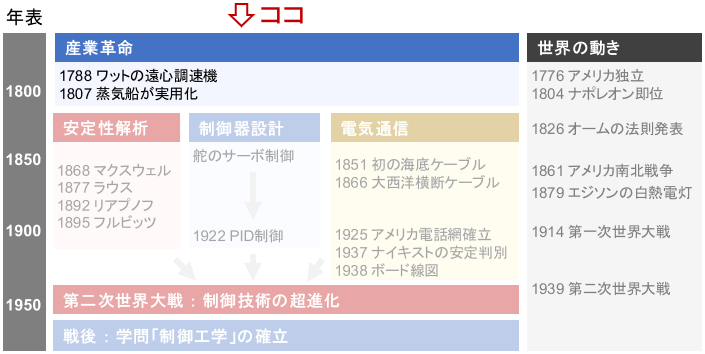
時は飛んで18世紀のイギリス。ここで制御工学の原点と言える装置が実用化されます。蒸気機関です。
蒸気機関は人類が初めて手にした原動機であり、産業革命をもたらしました。この蒸気機関の発展に多大な貢献をしたのが、ワット(Watt)です。
蒸気機関を産業利用するためには、生み出される回転の速度を一定に保つ必要がありました。しかし当初の蒸気機関は、つながれた負荷に応じて回転速度が大きく変化してしまい、実用性に問題がありました。
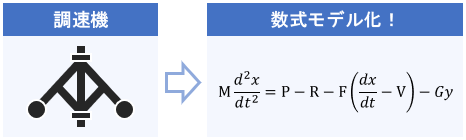
そこでワットは1788年、次のような機構の遠心調速機(ガバナー)を考案しました。
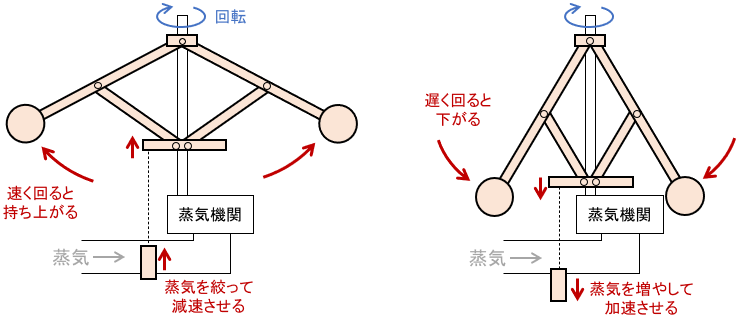
これのおかげで回転速度が安定化し、蒸気機関は超実用的な装置として一気に世界に広まりました。
とはいえこの機構は、制御工学的にはただの比例制御です。よって速度が揺らぎやすく、また負荷に応じて最終的な回転速度が変わる(定常偏差が生じる)という課題が残っていました。
その後の約100年間は、遠心調速機の改良の時代となります。1870年ごろまでに様々な調速機が発明され、膨大な数の特許が申請されたそうです。
産業革命以降:安定性解析の始まり
そうした取り組みの中で、「なんかしらんけど、遠心調速機によって速度が安定するどころか、暴れるようになる」という現象が見られるようになりました。システムと相性の悪い調速機によって、システム全体の安定性が低下してしまったわけですね。
この原因を物理的に解明する取り組みが、システムの安定性解析の始まりとなります。
※システムの安定性の意味とイメージについては、こちらのページをご覧ください。
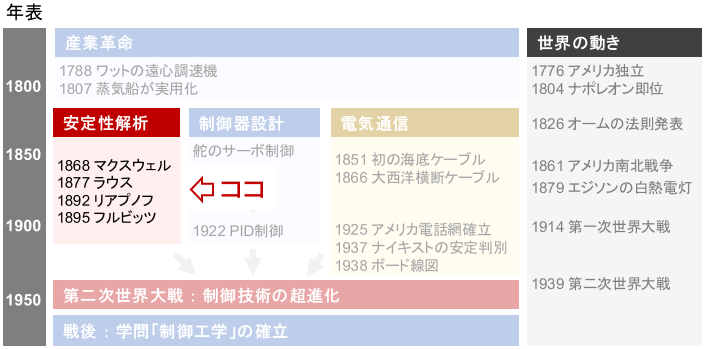
1868年:マクスウェルの安定性解析
その原点となる人物が、イギリスの物理学者マクスウェル(Maxwell)です。
1868年、マクスウェルは “On Governors” という論文にて、今日の安定性解析の基礎となる理論を発表しました。論文では、様々な遠心調速機を線形の微分方程式で表す方法と、その極の実部が負であればシステムが安定になることが示されました。
※極は「システムの特性がギューッと凝縮された便利なパラメータ」です。詳細については、こちらのページをご覧ください
実は、安定解析の研究自体は、マクスウェル以前にも存在はしていました。ただマクスウェルの研究は、数式モデルに基づいた汎用的な議論を展開したこと、そして安定性という概念を数学的に定式化したことが革新的でした。
つまりこの瞬間、制御がノウハウから科学になったわけです!工学としての制御はここから始まったとも言えるでしょう。
この理論は画期的でしたが、システムの極の導出が面倒であるのが欠点でした。
そこでマクスウェルは、極そのものではなく、安定性のみを手軽に判別できる方法がないか検討しました。しかし、3次システム(3階の線形微分方程式で表されるシステム)までの判別条件しか求めることができず、それ以上の次数は断念しました。

1877年:ラウスの安定判別法
それを知って立ち上がったのが、ラウス(Routh)です。
1877年、ラウスは全ての線形システムに対し、システムの安定性を手軽に判別する方法を考案します。これは、現在「ラウスの安定判別法」として知られているものです。
実は、ラウスとマクスウェルはケンブリッジ大学の同級生で、常に成績トップを争うライバルだったそうです。
2人のライバル関係がよく分かる逸話として、大学最後の大勝負である卒業試験での話があります。結果発表の日、勝利を確信したマクスウェルは、調子に乗って召使いに「2位の名前を見てこい」と命じます。すると、帰ってきた召使いに「あなた様でございました」と言われたそうです。

そんな関係だったので、マクスウェルが断念した安定判別法の研究は、ラウスにとって何が何でも自分が達成してやりたかったものなのでしょう。偉大な研究の裏には、意外と人間臭いドラマがあったわけですね。
1895年:フルビッツの安定判別法
少し時間は流れ、1895年のスイス。
フルビッツ(Hurwitz)とストドラ(Stodola)は共に安定性解析の研究を行い、独自に手軽な安定判別法を考案しました。これは、現在「フルビッツの安定判別法」として知られているものです。

後に、ラウスの安定判別法とフルビッツの安定判別法は、手順は違えど本質的には同じであることが分かりました。そのため、今日ではこれらをまとめて「ラウス=フルビッツの安定判別法」と呼ぶこともあります。
実はフルビッツもストドラも、マクスウェルやラウスの研究については全く知りませんでした。もし事前に知っていれば、この研究はやらなかった(やらずにすんだ?)のかもしれませんね。
ちなみに、ラウス=フルビッツの安定判別法は、線形システムにのみ適用可能なものでした。
1892年:リアプノフの安定性解析
ちょっと時間は戻って1892年、ロシアの学者リアプノフ(Lyapunov)は、(ほぼ)どんなシステムにも適用できる安定判別法を考案しました。
これは、「システムに対し、リアプノフ関数と呼ばれる関数を見つけることができれば、そのシステムは安定である」といったものでした。
この方法は非常に強力なものですが、当時はほとんど注目されませんでした。本格的に注目されるのは、リアプノフの死後50年ほど経ち、現代制御が生まれてからとなります。今日では、非線形制御の分野にて非常に重要な役割を担っています。

以上の安定性解析の研究により、「制御対象を数学的に分析することで、その性質を解明する」という制御工学的な考え方の基礎が固まりました。

これにより、制御性能が劇的に向上!
…したかと思いきや、これらの理論は当時の実用家たちにはほとんど相手にされなかったそうです。
それもそのはず。当時は制御工学という学問は当然ありませんでしたし、制御が科学であるとすら考えられていませんでした。むしろ機械設計屋さんが生み出す、巧妙なカラクリであると認識されていたため、システムを数学的に分析することに大きな意義を感じられなかったのかもしれませんね。

産業革命以降(その2):サーボ制御と制御器設計の始まり
それでは、同時期の実用家たちの技術動向についても見ていきましょう。
前述の通り、当時の制御のメインストリームは、制御を実現するメカ機構の設計でした。最初は蒸気機関であった制御対象も、産業革命を受けてすぐに多様化していきます。
その中の一つが蒸気船です。風で動く従来の帆船と比べると、自力で泳げる蒸気船の便利さは容易に想像できますよね。まもなく、ヨーロッパ・アメリカ間で物資を大量に運ぶための巨大な蒸気船が次々と製造されました。
船が高速・巨大になると、方向転換のための舵(かじ)を切るのにも非常に大きな力が必要となります。よってそれまでの人力に変わり、蒸気機関で舵を動かす制御が新たに必要となりました。これが、サーボ制御(機械的な位置or角度の追従制御)の始まりとなります。
具体的には、人が軽いハンドルで舵の角度を指令すると、それに応じて蒸気機関のバルブが開閉し、舵が指令された角度に動く、という制御機構が様々に開発されました。
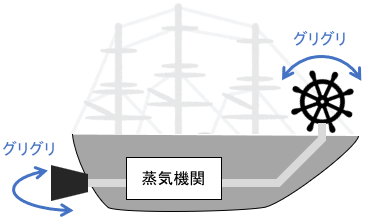
ご主人の指令に追従して舵が黙々と働くので、英語で「召使い」を意味する “servant” から「サーボ制御」という名前がつけられたそうです。
制御の観点で見ると、制御目的が定値制御から追従制御に変わったことが大きな変化点であると言えます。蒸気機関では回転速度をとにかく一定にするのが目的だったのに対して、舵の制御は様々に変化する指令角度を実現することが目的となったわけですね。
そんな中、ロシアの学者マイノースキー(Minorsky)は、既存の様々なサーボ制御器の構造を数学的に分析しました。
その後の1922年、数学的に一般化した制御器として、比例・積分・微分の3要素を備えた制御器、すなわちPID制御の原型を発表しました。
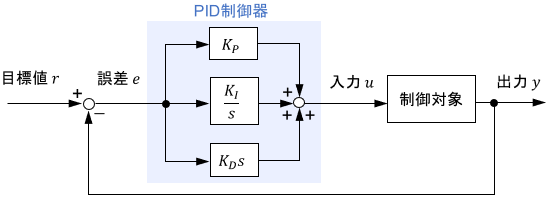
PID制御は、シンプルさと実用性を兼ね備えた、制御工学を代表する制御則です。現代でも「この世で使われている制御器の8割はPID」と言われるほど、非常に広く使用されています。
マイノースキーの研究は、工学的な制御器設計の原点の1つだと言えるでしょう。
※PID制御の詳細については、こちらのページをご覧ください

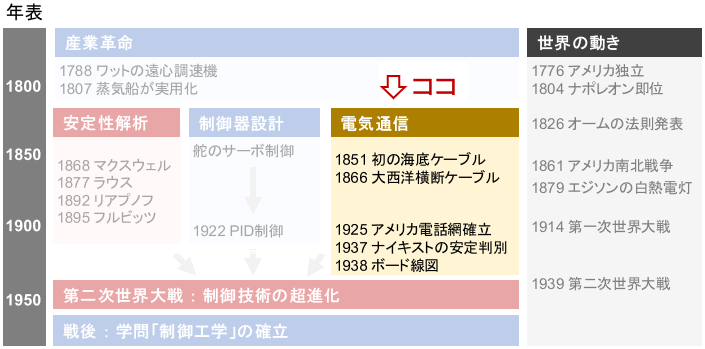
電気通信時代:周波数解析と安定解析の進化
電気通信の始まり
蒸気船の発達に伴い、人々の交信・交易もどんどん長距離化していきました。
その中でも特筆すべきは、電気通信の発達です。1800年代中頃から、欧米にて電信線が怒涛の勢いで整備されていきました。
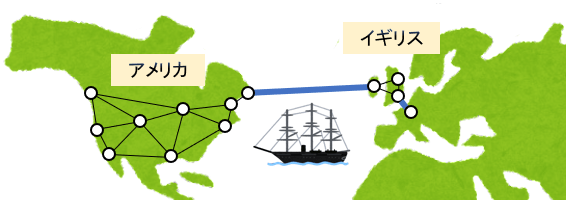
1851年には、ドーバー海峡に世界初の海底ケーブル(574km)が敷設され、イギリス・フランス間の電気通信が可能となりました。
少し後の1866年、大西洋を横断する海底ケーブル(約3000km!)も敷設されました。この敷設には、当時世界最大の蒸気船であったグレート・イースタンが大活躍したそうです。これにより、イギリス・アメリカ間の電気通信が実現されました。
電気通信の音声版である電話も少し遅れてどんどん整備されていき、1925年にはアメリカのほぼ全土が電話線で結ばれました。
このような背景の中、アメリカの電気分野の研究者を中心に、電気通信技術が発達していきます。
通信が長距離化するにつれてまず問題となったのが、電気信号の減衰でした。信号が長~い電線を通ると次第にエネルギーがなくなっていき、最終的にはほとんど届かなくなってしまうわけですね。
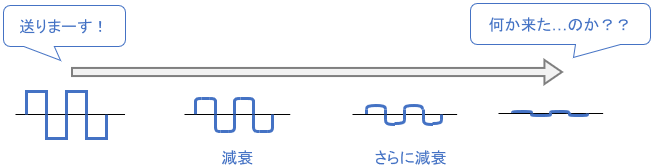
これを解消するためには、電気信号を増幅する装置、すなわちアンプを通信網の間に挟む必要がありました。しかし当時のアンプは性能が悪く、増幅した信号が歪んだり、ノイズが乗ったりしてしまったそうです。
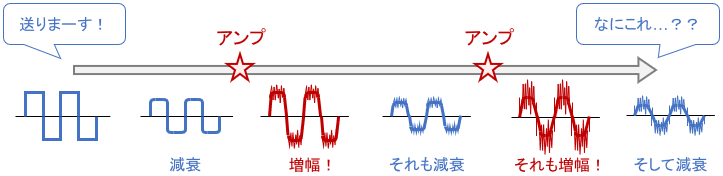
長距離通信の場合は、途中に数十個のアンプが必要であったので、良質な通信のために高性能なアンプの開発が望まれました。
1927年:ブラックの負帰還増幅回路
そんな中の1927年、アメリカの電気エンジニアのブラック(Black)が、死ぬほどキレイに電気信号を増幅できるアンプを考案します。
これは負帰還増幅回路と呼ばれるもので、次のようにオペアンプの出力信号をフィードバックし、入力信号から引くというものでした。
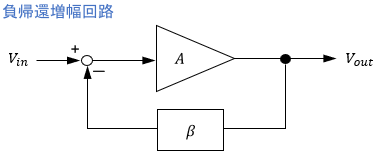
ちなみに制御用語としての「フィードバック」という言葉は、この回路にて初めて使われたそうです。
負帰還増幅回路はその性能からエレクトロニクス界で革命的な存在となります。しかし、フィードバックループが入っているため、回路の設計が悪いと動作が不安定になるという欠点もありました。
1932年:ナイキストの安定判別法
これを解決したのが、アメリカの電気通信研究者ナイキスト(Nyquist)です。
1932年、ナイキストは負帰還増幅回路の安定判別法を発表しました。これは、現在「ナイキストの安定判別法」として知られているものです。
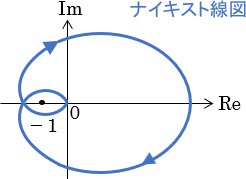
これにより、負帰還増幅回路の設計効率が格段に向上しました。
※ナイキストの安定判別法については、こちらのページをご覧ください

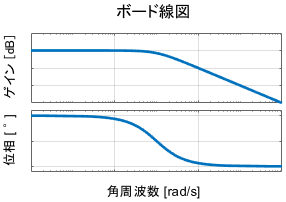
1938年:ボード線図と安定余裕
1938年には、アメリカの電気通信研究者ボード(Bode)により、ボード線図が考案されます。
ボード線図により、電気信号を周波数の観点で分析することが容易になりました。
1940年、ボードはさらに安定余裕(ゲイン余裕・位相余裕)の概念を考案します。安定余裕は「フィードバック制御システムが安定だとしたときに、それがどれくらい安定であるか」を示す指標です。
従来の安定性解析は、システムが安定か不安定かのみが分かるものでした。それがボードの理論によって、「ギリギリ安定」なのか「余裕で安定なのか」が分かるようになり、安定性解析が1段階進化したと言えます。
こうしたボードの研究により、古典制御の強みである周波数解析の基礎が確立されました。
※周波数解析とボード線図の詳細については、こちらのページをご覧ください。

以上のように、電気通信の研究の中で、フィードバック・周波数解析・安定余裕解析といった現在の制御工学的な概念が生まれました。
ただ当時は制御工学という学問が確立していなかったため、これらは全て電気通信分野の技術だと認識されていました。
そんな中、これらの技術が他分野と融合するきっかけとなる出来事が起こります。
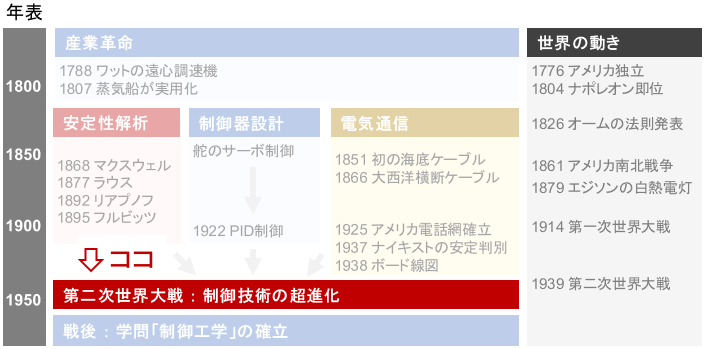
第二次世界大戦:制御技術の超進化
自動対空砲と、技術の超融合
第二次世界大戦が始まった当時、ブラック・ボード・ナイキストらはアメリカの電気通信研究所であるベル研究所(通称ベル研)に所属していました。
※ベル研究所は、20世紀に世界のトップを走り続けた伝説的な研究所です。様々な革新的技術(電波望遠鏡・トランジスタ・レーザー・太陽電池・UNIX・C言語・無線LANなど)がここで生まれ、これまでに9つのノーベル賞が授与されています。
それまでは主に電気通信技術を研究していたベル研ですが、戦争に伴いその研究フィールドを軍事技術に拡大します。
その中でも象徴的なのが、戦闘機を撃墜する自動対空砲システムの開発です。このシステムは、次のような仕組みで、戦闘機を自動攻撃するものでした。
- 戦闘機をレーダーで補足する
- レーダーのデータを、無線で計算機(電気によるアナログ式)に送信する
- 計算機で戦闘機の飛行軌道を予測し、対空砲の照準と発射タイミングを算出する
- サーボ制御によって対空砲の照準を合わせ、敵を撃つ!
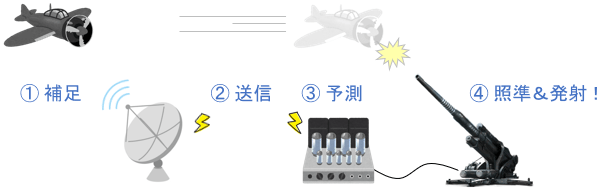
電気・無線通信・信号処理・機械制御という、今日の制御工学に欠かせない技術ばかりですね。それまで独立していたそれらの技術が、遂に1つのシステムとして高度に融合したわけです!
これに多大な貢献をしたボードは、この融合を「技術のショットガン・マリッジ(Shotgun Marriage)」というユーモアを交えた言葉で表現しています。
ショットガン・マリッジは日本語で言うところの「できちゃった婚」ですが、日本語のような生易しいニュアンスではなく、「娘に子供ができちゃったことを知った父親がブチギレて、彼氏にショットガンを突きつけ、『責任を取って一緒になれ!』と迫るさま」から来ています。
つまり、戦争という「ショットガン」が圧力となり、それまで独立していた技術が融合(結婚)せざるを得なくなった、という背景を表しているわけですね。

経緯は残念なものですが、これにより電気通信の技術であった周波数解析や安定余裕解析が機械システムにも適用され、機械制御(特にサーボ制御)の技術が飛躍的に向上しました。
電気と機械の融合により自動化を実現したこのシステムは、世界初のロボット兵器の1つであるとも考えられています。
大戦での活躍と、世界初のロボット戦争
当時最新鋭の兵器であったベル研の対空砲は、戦時中に多くの場所で戦果を上げました。
1944年2月のアンツィオ(イタリア)では、100機以上の敵機撃墜に成功したそうです。直後のノルマンディー上陸作戦でも39機が配備され、侵攻部隊をドイツ空軍から守りました。
そんな中、ベル研の対空砲の最大の好敵手となる兵器が、ドイツ空軍によって開発されます。巡航ミサイルの元祖、V-1飛行爆弾です。(以下、V-1と呼びます)
V-1は長距離を自律的に飛行し、目標地点に到達すると自動で落ちて爆発する機能を備えていました。早い話が、格安の無人特攻機ですね。
1944年6月よりドイツ軍は、最初にイギリス、続いてベルギーに向けて大量のV-1を発射しまくります。大戦中、合計で2万発近くものV-1が発射されたそうです。
連合国側はV-1への対抗策として、盾気球の展開、戦闘機による妨害、対空砲部隊の配備などを行います。この対空砲部隊に、ベル研の自動対空砲も加わっていました。
つまり第二次世界大戦にて、空から自動攻撃するV-1と、陸から自動攻撃するベル研の対空砲という、原始のロボット兵器が史上初めてぶつかることとなったわけです!

V-1は各都市に打撃を与えることに成功し、市民の恐怖の対象となりました。
ただ、ベル研の対空砲に限って言うと、射程内に侵入したV-1の90%近くを撃ち落とすことに成功していたそうです。
V-1の飛行軌道は「高度と速度を一定に保って直線的に飛ぶ」というものだったのですが、これはまさにベル研の対空砲が軌道予測時に想定している動きだったことが決定的でした。
前述の通り、ベル研の対空砲は動き回る戦闘機ですらそこそこ撃ち落とせていたわけなので、V-1はチョロい相手だったというわけですね。
最初のロボット戦争は、ベル研の対空砲の勝利と言えるでしょう。

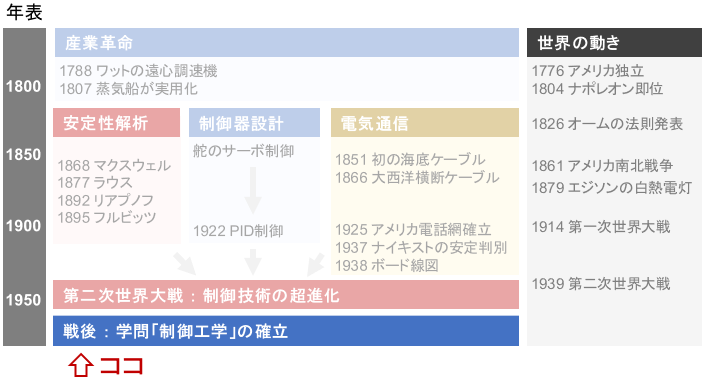
戦後:学問「制御工学」の確立
終戦後、ボードらによって、戦争中に開発された制御技術が次々と書籍にまとめられました。
その際、制御対象を汎用的な数式モデルで表現し、それに基づいて理論を展開することで、様々な分野の制御技術が、体系的な理論としてまとめられました。
こうして、現在「古典制御」と分類されている制御工学理論が成立しました。ワットの遠心調速機から約150年たったこのタイミングで、ついに制御が学問として確立したわけですね!

その後まもなく現代制御が生まれ、制御工学の(学問としての)主役は古典制御から現代制御に移ります。この後のストーリーについては、こちらのページをご覧ください。
主役を譲ったとはいえ、古典制御には現代制御にはない独自の強みがあり、現在も幅広く使われています。両者の違いについてはこちらのページにて解説していますので、合わせてご覧ください。
参考文献(歴史系の記事共通)
- R. E. Kalman『On the General Theory of Control Systems』(1960年)
- A. E. Bryson, W. F. Denham『A Steepest-Ascent Method for Solving Optimum Programming Problems』(1962年)
- R. J. BACKUS『The Defense of Antwerp Against the V-1 Missile』(1971年)
- Bernard D. Holbrook『A History of Computing Research at Bell Laboratories (1937-1975)』(1982年)
- 示村 悦二郎『自動制御とは何か』(1990年)
- David A. Mindell『Automation’s Finest Hour: Bell Labs and Automatic Control in World War II』(1995年)
- Arthur E. Bryson Jr.『Optimal Control – 1950 to 1985』(1996年)
- Stuart Bennett『A Brief History of Automatic Control』(1996年)
- 鈴木 真二『最適制御は航空機を救えるか』(1996年)
- 荒木 光彦, 須田 信英『PID制御の歴史』(1997年)
- 足立修一, 大須賀公一『システム制御へのアプローチ』(1999年)
- David A. Mindell『Automation’s Finest Hour: Radar and System Integration in World War II』(2000年)
- 大嶋 正裕『モデル予測制御ー理論の誕生・展開・発展ー』(2000年)
- Petar Kokotovic, Murat Arcak『Constructive nonlinear control: a historical perspective』(2001年)
- 原 辰次『ロバスト制御理論の回顧と展望』(2001年)
- 木村 英紀『制御工学の考え方』(2002年)
- 大嶋 正裕, 小河 守正『モデル予測制御一Ⅰ一基礎編:発展の歴史と現状』(2002年)
- Michael G. Safonov『Origins of robust control: Early history and future speculations』(2012年)
- 宮里 義彦『適応制御の回顧と展望』(2013年)
- Ernie Hayden, Michael Assante, Tim Conway『An Abbreviated History of Automation & Industrial Controls Systems and Cybersecurity』(2014年)
- Karl Astrom『History of Adaptive Control』(2014年)
- Sreenatha G. Anavatti, Fendy Santoso, Matthew A. Garratt『Progress in Adaptive Control Systems: Past, Present, and Future』(2015年)
- Jamshed Iqbal, Mukhtar Ullah, Said Ghani Khan, Baizid Khelifa, Saša Ćuković『Nonlinear control systems – A brief overview of historical and recent advances』(2017年)
- 岩田 隆敬『宇宙分野におけるカルマンフィルタの応用』(2017年)
- 足立 修一『古くて新しいカルマンフィルタ』(2017年)
コメント