
このページでは、フィードバック制御とフィードフォワード制御の違いについて、それぞれの利点を比較しながら解説します。
- フィードバック制御は、実際の状況に基づいた制御。後手の制御。
- フィードフォワード制御は、予測に基づいた制御。先手の制御。
- 基本性能はフィードバック制御の圧勝。
- ただし、応答速度だけはフィードフォワード制御のほうがよい。
- 両者を組み合わせて、利点をいいとこ取りするのがベスト。
フィードバック制御とは
フィードバック制御は、実際の状況をリアルタイムに取得し、それに基づいて制御入力を決定する制御手法です。FB制御・閉ループ制御・クローズドループ制御とも呼ばれます。
車の運転でいうと、運転手が周囲の状況を把握しながら運転をしている状況ですね。
フィードバック制御の一般的なブロック線図を次に示します。

出力信号をフィードバックする矢印によりブロック線図内で閉じたループができるため、閉ループ制御とも呼ばれるわけです。
※上のブロック線図の読み方が分からない方は、こちらの記事をご覧ください

フィードバック制御は実際の状況に基づくため、外乱やモデルの誤差があっても、ある程度その悪影響を抑制できるという利点があります。
外乱・誤差は現実世界には必ず存在しますので、フィードバックは実質的にほぼ必須であると言えるでしょう。
フィードフォワード制御とは
フィードフォワード制御は、実際の状況を取得せずに、システムのモデルに基づいて動作を予測しながら制御入力を決定する制御手法です。FF制御・開ループ制御・オープンループ制御とも呼ばれます。
車の運転でいうと、運転手が目をつぶりながら周囲の状況を予測して運転をしている状況です。
フィードフォワード制御の一般的なブロック線図を次に示します。

出力信号のフィードバックが無いため、ブロック線図内にループがありませんね。「ループが開いている」という意味で開ループ制御とも呼ばれるわけです。
これ、明らかに危なっかしいですよね。実際の状況を確認できないので、当然ながら外乱や誤差に非常に弱いという欠点があります。
ただ、現実にはフィードフォワード制御も非常に多く使用されています。最も多いのは、直接取得する方法のない現象を制御する場合です。
例えば安い炊飯器は「お米の状態」を直接取得することができないので、あらかじめ設定された動作で(お米の状態を予測しながら)ご飯を炊きますよね。
フィードバック制御とフィードフォワード制御の比較
ほーん。まあ、とりあえずフィードバック制御使っとけばいいんでしょ?
と思うかもしれません。正直そのとおりなのですが、だからといってフィードバック制御はフィードフォワード制御の完全上位互換とは言えないのが面白いところです。順番に説明していきましょう。
フィードバック制御とフィードフォワード制御の性能をざっくり比較すると、次のようになります。
| 項目 | フィードバック制御 | フィードフォワード制御 |
|---|---|---|
| 安定性 | ○ | △ |
| 追従精度 | ○ | △ |
| 応答速度 | ○ | ◎ |
| 外乱への対応 | ○ | ✕ |
| 特性変動への対応 | ○ | ✕ |
※性能評価の各項目については、こちらのページをご覧ください
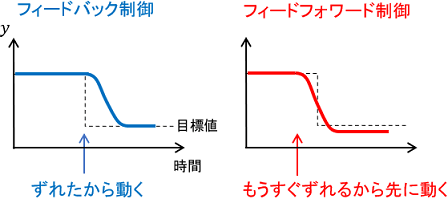
フィードバック制御はいかにも優等生な性能ですね。ただし、応答速度だけはフィードフォワード制御が優れます。これは、フィードフォワード制御がフィードバック制御にない予測を行うことに起因します。
より具体的には、フィードバック制御は、目標値と出力の間に誤差が生じて初めて制御を行う「後手の制御」です。一方、フィードフォワード制御は、将来を予測して「先手の制御」を行うと解釈できます。
結局組み合わせが最強
フィードバック制御とフィードフォワード制御は二者択一の関係にはありません。両者を組み合わせて、それぞれの利点をいいとこ取りすることも可能です。実際、現実の高度な制御器のほとんどは、そのような構成になっています。
次のブロック線図は、フィードバック制御とフィードフォワード制御を組み合わせた単純な制御器の一例です。
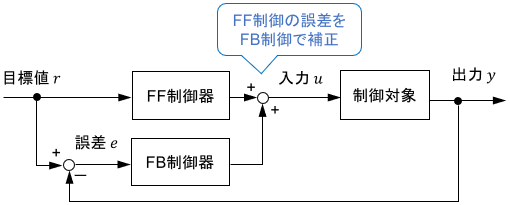
上半分はフィードフォワード制御のブロック線図、下半分はフィードバック制御のブロック線図となっていることが分かるかと思います。
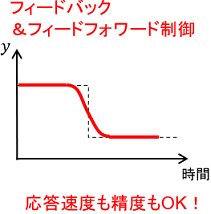
このように、フィードバック制御だけでは目標とする性能が得られない場合、フィードフォワード制御と組み合わせることで性能を向上できることは、覚えておいてくださいね。
以上、フィードバック制御とフィードフォワード制御の違いと、それぞれの利点についての解説でした。
- フィードバック制御は、実際の状況に基づいた制御。後手の制御。
- フィードフォワード制御は、予測に基づいた制御。先手の制御。
- 基本性能はフィードバック制御の圧勝。
- ただし、応答速度だけはフィードフォワード制御のほうがよい。
- 両者を組み合わせて、利点をいいとこ取りするのがベスト。
コメント