このページでは、ナイキストの安定判別法、およびナイキスト線図の使い方と利点を、例を通じて詳しく解説します。また、特定の条件下で使える簡易版ナイキストの安定判別法についても解説します。
- ナイキストの安定判別法は、フィードバック制御システムの内部安定性を図式的に判別する手法
- そのために使うのがナイキスト線図
- 数式から内部安定性を判別するよりもお手軽なのが利点
- ゲイン余裕・位相余裕といった安定余裕が分かるのも利点
ナイキストの安定判別法とは
対象システムと伝達関数
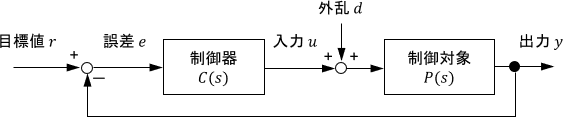
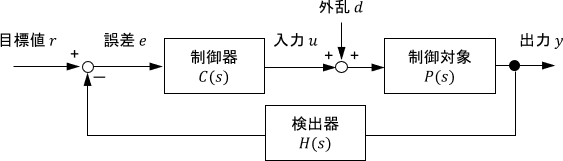
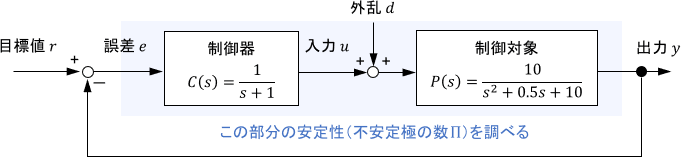
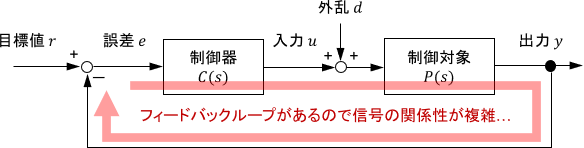
ナイキストの安定判別法は、下図で表されるようなフィードバック制御システムの内部安定性を図式的に判別する手法です。
※内部安定性は、フィードバック制御システムの本質的な安定性を示す性質です。詳細は、こちらのページをご覧ください
すぐ後で詳しく説明しますが、ナイキストの安定判別法は、システムの開ループ伝達関数$C(s)P(s)$のベクトル軌跡を応用した、ナイキスト線図を用いるのが特徴です。
※ちなみにナイキスト線図上の軌跡(上図の青線)は、ナイキスト軌跡と呼ばれます。「ナイキスト軌跡が書かれた図」がナイキスト線図であると理解すればOKです。
なお、下図のようにシステムが検出器$H(s)$を持つ場合は、以降の説明にて開ループ伝達関数$C(s)P(s)$を一巡伝達関数$C(s)P(s)H(s)$に読み替えればOKです。
実用上はシステムが検出器を持たないケースがほとんどなので、以降では開ループ伝達関数をベースに説明していきます。
※システムが検出器を持たない場合は$H(s)=1$となるので、一巡伝達関数$C(s)P(s)H(s)$は開ループ伝達関数$C(s)P(s)$に等しくなります。開ループ伝達関数・一巡伝達関数については、こちらのページをご覧ください
安定判別方法
ナイキストの安定判別法の具体的な手順は、次のようにまとめられます。
- 開ループ伝達関数$C(s)P(s)$のベクトル軌跡$C(j\omega)P(j\omega)$を描く
- それを実軸(横軸)に対してひっくり返した軌跡も追加で描き、ナイキスト線図を作る
- ナイキスト軌跡が点(-1,0)のまわりを時計回りに回る回数を数え、それを$N$とする
- システムの開ループ伝達関数$C(s)P(s)$が持つ不安定極の数を数え、それを$\Pi$とする
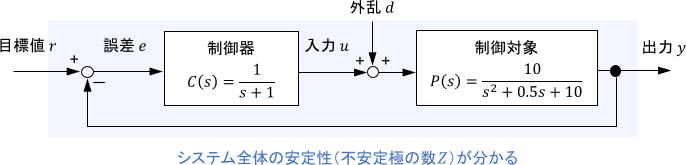
- 閉ループシステムの不安定極の数$Z$を、$Z=N+\Pi$によって求める
- $Z=0$であればシステムは内部安定
以降、それぞれの手順を具体例を通じて詳しく説明していきましょう。
安定判別の例
例1
制御器$C(s)$、制御対象$P(s)$がそれぞれ次式で表されるシステムを考えます。
$$C(s)=\frac{1}{s+1},\qquad P(s)=\frac{10}{s^2 + 0.5 s + 10}$$

このシステムにナイキストの安定判別法を適用して、内部安定性を調べていきましょう。
1. 開ループ伝達関数のベクトル軌跡を描く
開ループ伝達関数$C(s)P(s)$のベクトル軌跡$C(j\omega)P(j\omega)$を描くと、下図のようになります。
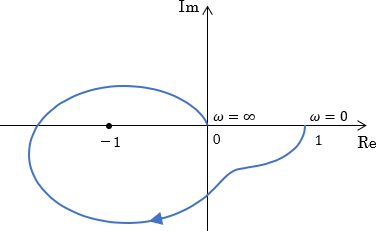
※ベクトル軌跡とその描き方については、こちらのページをご覧ください

2. それを実軸に対してひっくり返した軌跡も追加で描き、ナイキスト線図を作る
軌跡を上下にひっくり返し、元の軌跡に上書きします。このとき、軌跡の矢印(角周波数$\omega$が大きくなる方向を示す矢印)の向きも反転させます。
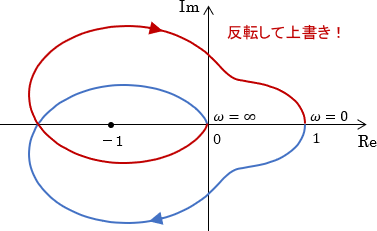
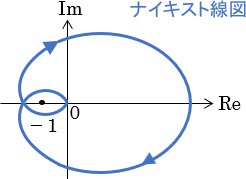
これがナイキスト線図です。
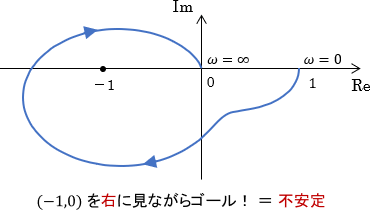
3. ナイキスト軌跡が点(-1,0)のまわりを時計回りに回る回数を数える
ナイキスト軌跡(ナイキスト線図上の軌跡)を矢印方向に辿り、点(-1,0)のまわりを時計回りに回る回数を数えます。この回数を$N$として控えておきましょう。
下図のように、点(-1,0)を始点としてナイキスト軌跡を指すベクトルが、何回回転するかを数えるイメージです。
矢印の長さは無視して、回転数だけを数えましょう。もし反時計回りに回った場合は、-1回として数えればOKです。
今回の場合は、$N=2$ですね。
4. システムの開ループ伝達関数が持つ不安定極の数を数える
続いて、下準備として開ループ伝達関数$C(s)P(s)$が持つ不安定極の数を数えます。この数を$\Pi$として控えておきましょう。
※実部が正である極のことを、不安定極と呼びます。詳細はこちらのページをご覧ください
$$C(s)P(s)=\frac{1}{s+1}\cdot\frac{10}{s^2 + 0.5 s + 10}\quad の極は、\quad\ubg{-1\ と\ -\frac{1}{4}\pm\frac{\sqrt{159}}{4}j}{全部安定!}$$
$j$は虚数単位です。今回の場合は不安定極が無いので、$\Pi=0$ですね。つまり、開ループシステムは安定であることが分かります。
5. 閉ループシステムの不安定極の数を求める
下準備が終わったので、いよいよ安定性を判別していきます。
閉ループシステムの不安定極の数$Z$(※)は、次式で得られることが知られています。
$$閉ループシステムの不安定極の数Z=\ubg{ナイキスト軌跡の回転数N}{今回は2}+\ubg{開ループ伝達関数の不安定極数\Pi}{今回は0}=今回は2$$
※より厳密には、$Z$は「フィードバック制御システム内の入出力信号を結ぶ、全ての伝達関数が持つ不安定極の数」です。これは、下記ページの最後で紹介した内部安定性の判別式である、$1+C(s)P(s)=0$によって得られる不安定極の数に相当します。
今回の場合は、閉ループシステムが不安定極を2つ持つことが分かりました。よって、このシステムは内部安定でないことが分かります。簡単に言うと「使いものにならない」ということですね。
開ループ伝達関数は安定でしたが、信号がフィードバックループをグルグル回ることによって、システム全体は不安定になってしまったと解釈できます。
例2
もう一つ、シンプルな例も見てみましょう。開ループ伝達関数$C(s)P(s)$が次式で表されるシステムを考えます。
$$C(s)P(s)=\frac{1}{s+1}$$
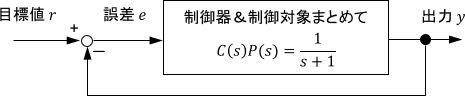
このシステムにナイキストの安定判別法を適用して、内部安定性を調べていきましょう。サクサクッと進めていきます。
1. 開ループ伝達関数のベクトル軌跡を描く
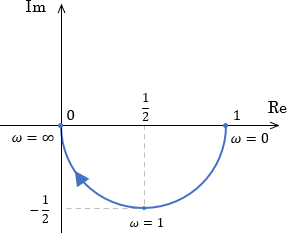
2. それを実軸に対してひっくり返した軌跡も追加で描き、ナイキスト線図を作る
3. ナイキスト軌跡が点(-1,0)のまわりを時計回りに回る回数を数える
矢印がウネウネ動くだけで回転はしていないので、回転数$N=0$ですね。
4. システムの開ループ伝達関数が持つ不安定極の数を数える
$$C(s)P(s)=\frac{1}{s+1}\quad の極は、\quad-1のみ\quad\color{green}{安定!}$$
今回の場合も不安定極が無いので、不安定極の数$\Pi=0$ですね。
5. 閉ループシステムの不安定極の数を求める
それでは、これまでの情報を用いて安定性を判別します。
$$閉ループシステムの不安定極の数Z=\ubg{ナイキスト軌跡の回転数N}{今回は0}+\ubg{開ループ伝達関数の不安定極数\Pi}{今回は0}=今回は0$$
システムが不安定極を持たないため、今回のシステムは内部安定であることが分かりました!
簡易版ナイキストの安定判別法
上で考えた例は、どちらも開ループ伝達関数$C(s)P(s)$が安定(不安定極が0個)でした。これらのシステムに限らず、実用上取り扱うシステムは開ループ伝達関数が安定であることがほとんどです。
このとき、ナイキストの安定判別法の最後で用いる式は、次のように変形できます。
$$\begin{align}閉ループシステムの不安定極の数Z&=ナイキスト軌跡の回転数N+\ubg{開ループ伝達関数の不安定極数\Pi}{これが0になる}\\&=ナイキスト軌跡の回転数N\end{align}$$
$Z=0$のときにシステムは内部安定となるため、上式より内部安定性の条件は$N=0$、つまり「ナイキスト軌跡が点(-1,0)のまわりを全く回らない」と言い換えられます。
「ナイキスト軌跡が点(-1,0)を回るかどうか」を確かめるだけであれば、わざわざベクトル軌跡をひっくり返してナイキスト線図を作る必要は無く、安定判別を簡略化できます。これについて、詳しく解説していきましょう。
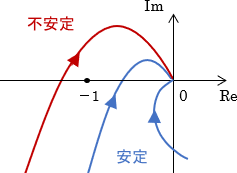
まず、厳密にプロパーなシステムのベクトル軌跡は必ず実軸からスタートし、原点に収束することが知られています。
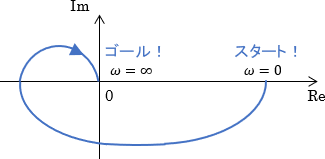
※「厳密にプロパーな伝達関数」とは「分子の次数<分母の次数」を満たす伝達関数のことです。古典制御で扱う伝達関数のほとんどは厳密にプロパーです。詳しくはこちらのページをご覧ください。
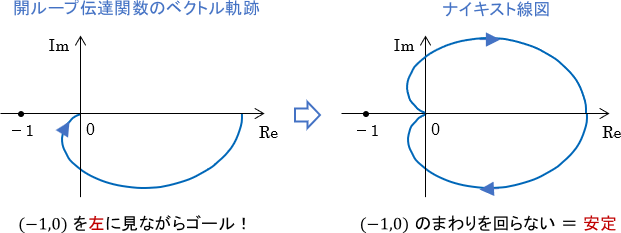
これまでの例も全てそうでしたね。この性質を考慮すると、もし開ループ伝達関数のベクトル軌跡が点(-1,0)を左に見ながら原点に向かえば、ナイキスト軌跡は点(-1,0)を回らないことになります。
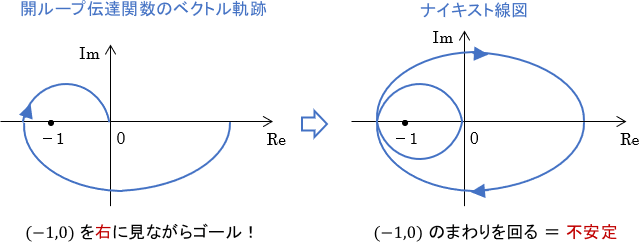
逆に、もし開ループ伝達関数のベクトル軌跡が点(-1,0)を右に見ながら原点に向かえば、ナイキスト軌跡は点(-1,0)を回ることになります。
以上をまとめると、開ループ伝達関数が安定なシステムに対するナイキストの安定判別法は次のように簡略化されます。
- 開ループ伝達関数のベクトル軌跡$C(j\omega)P(j\omega)$を描く
- それが点(-1,0)を左に見ながら原点に向かえば、システムは内部安定
非常にシンプルになりましたね!前述の通り、実用上取り扱うシステムは開ループ伝達関数が安定であることがほとんどであるため、この方法を使うことでより効率的に安定判別が可能となるわけですね。
簡易版ナイキストの安定判別法の例
それでは、上記の簡易版ナイキストの安定判別法の例を見ていきましょう。
先ほどの例題で扱ったシステムは両方とも開ループ伝達関数が安定であったので、これらのシステムに簡易版ナイキストの安定判別法を適用し、同じ結果が得られることを確認します。
例1
最初の例は、制御器$C(s)$、制御対象$P(s)$がそれぞれ次式で表されるシステムでした。
$$C(s)=\frac{1}{s+1},\qquad P(s)=\frac{10}{s^2 + 0.5 s + 10}$$
これの開ループ伝達関数$C(s)P(s)$のベクトル軌跡$C(j\omega)P(j\omega)$は次の通りでしたね。
点(-1,0)を右に見ながら原点に向かっているので、このシステムは内部安定でないことが分かります。確かに、先ほどと同じ結果になっていますね。
例2
2つ目の例は、開ループ伝達関数$C(s)P(s)$が次式で表されるシステムでした。
$$C(s)P(s)=\frac{1}{s+1}$$
これの開ループ伝達関数$C(s)P(s)$のベクトル軌跡$C(j\omega)P(j\omega)$は次の通りでした。
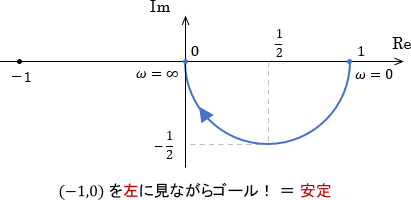
点(-1,0)を左に見ながら原点に向かっているので、このシステムは内部安定であることが分かります。これも先ほどと同じ結果ですね。
例を見ると、簡易版がとてもお手軽であることが実感できますね!
ナイキストの安定判別法の利点
最後に、ナイキストの安定判別法の利点についてまとめておきます。
式から判別するよりお手軽
フィードバック制御システムの安定性は「内部安定性」という観点で考える必要があるため、数式から安定性を判別しようとすると計算がかなり面倒になってしまうのでした。
一方でナイキストの安定判別法は、ナイキスト線図(簡易版なら開ループ伝達関数のベクトル軌跡)を用いることで面倒な計算なしに安定性を判別できるのが利点です。
ベースとなるのは開ループ伝達関数なので、扱う数式がシンプルになるのも嬉しい点ですね。

いや、ナイキスト線図を書くのも結構面倒なんですけど…
と思うかもしれませんが、ナイキスト線図(つまり開ループ伝達関数のベクトル軌跡)はシステムの動作データからも描けるのがポイントです。
ベクトル軌跡はシステムの周波数特性を図で表したものでしたね。よって、システムの動作データから周波数特性を導くことができれば、それを使って数式計算なしにベクトル軌跡を描けることになります。
周波数特性を導くための動作データとしては、システムのインパルス応答が代表的です。
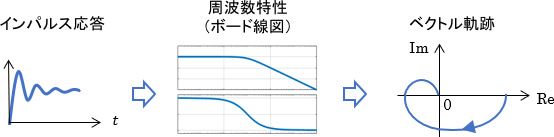
※インパルス応答と周波数特性の関係性については、こちらのページをご覧ください

また、どうしても伝達関数からナイキスト線図を描く必要がある場合でも、最近はコンピュータが自動で描画してくれますので、手間はかなり少なくなっています。

※例えばこちらのサイトでは、入力した伝達関数に対し、ナイキスト線図を含め様々な性質を自動で計算してくれます。
安定余裕が分かる
ナイキストの安定判別法のもう一つの大きな売りは、システムの安定余裕(ゲイン余裕・位相余裕)が分かることです。
安定余裕とは、「フィードバック制御システムが安定(内部安定)だとしたときに、それがどれくらい安定であるかを示す指標」です。
実際に使うシステムがギリギリ安定では困るので、安定余裕の観点は実用上非常に重要であると言えます。

※安定余裕の詳細については、こちらのページをご覧ください
以上、ナイキストの安定判別法の使い方と利点についての解説でした。
こちらのページでは「なぜナイキストの安定判別法で安定性が判別できるのか」を具体例を通じて直感的に解説していますので、合わせてご覧ください!

- ナイキストの安定判別法は、フィードバック制御システムの内部安定性を図式的に判別する手法
- そのために使うのがナイキスト線図
- 数式から内部安定性を判別するよりもお手軽なのが利点
- ゲイン余裕・位相余裕といった安定余裕が分かるのも利点