
制御工学は今や立派な学問ですが、その起源や進化の過程が超おもしろいことはご存知ですか?
このページでは、古典制御に続いて生まれた制御手法である現代制御の歴史(1980年ごろまで)をご紹介します。技術の背景にある歴史を知ると、その思想をより理解できるようになりますよ!
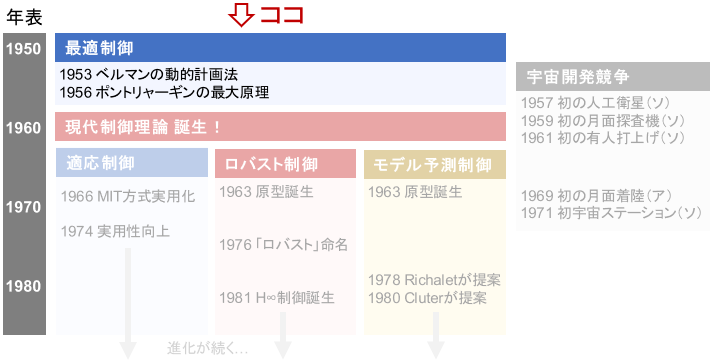
※このページは、こちらのページの続きです
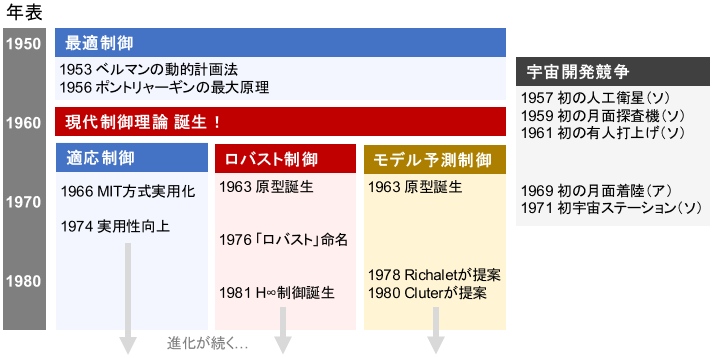
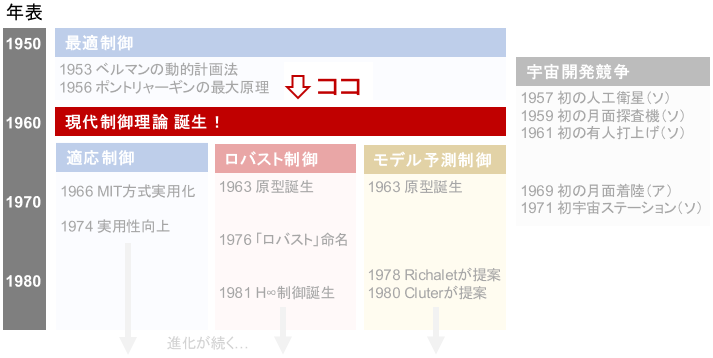
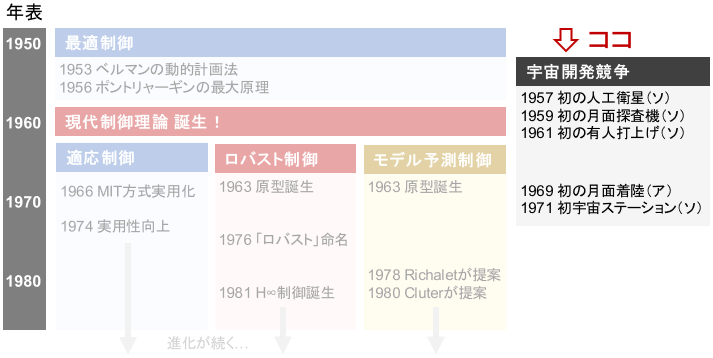
1950年~:最適制御の始まり
背景:宇宙開発競争
第二次世界大戦後、冷戦のボス国であるアメリカとソ連は、宇宙開発競争にしのぎを削ります。
当時、宇宙開発は技術力の強烈なシンボルでした。よってこの競争に勝つことは、国民や諸外国へ「我が国こそが世界のトップだ!」と宣言することに等しく、両者にとって絶対に負けられないものでした。
また、ロケット技術はそのまま軍事技術への応用に直結するため、政治的にも技術的にも非常に重要な開発対象でした。

そのような中で、制御に求められる性能は急激に上昇しました。科学者たちは「今より優れた制御器はないか?」という考えを突き詰めるうちに、「これ以上ないベストな制御器は何か?」という考えに至ります。最適制御の始まりです。
最適制御は、制御対象と制御目的を数式で表し、それらに基づいて最適な制御方法を数学的に求める制御手法です。なんだかすごく難しそうですよね…。実際その通りで、この問題を打倒するために、当時の天才科学者たちが次々と立ち上がりました。
1953年:ベルマンの動的計画法
1953年、アメリカの学者ベルマン(Bellman)は、有名な最適制御問題の解法である動的計画法を発表しました。
動的計画法は「複雑な最適制御問題をシンプルな部分問題に分割し、それぞれを芋づる式に解くことで、全体の解を求める」というアイデアの手法です。
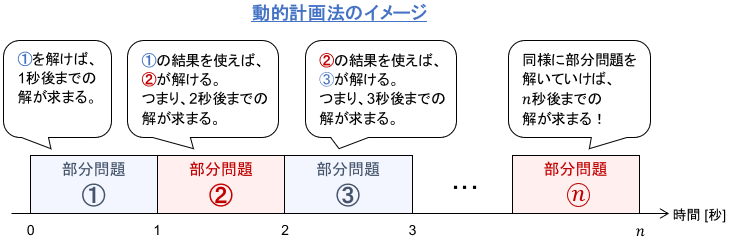
これにより、複雑な最適制御問題も、何とか手に負えるようになりました。
ちなみに「動的計画法」というなんとも抽象的な名前をつけたのは、上層部から目をつけられないためだったそうです。というのも、当時の国防長官(ベルマンの上司)が研究や数学というものを病的に嫌っており、研究を続けるためにはベルマンの取り組みが数学的であることを隠す必要があったといいます。
1956年:ポントリャーギンの最大原理
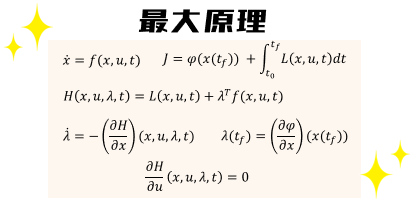
一方のソ連では、1956年にポントリャーギン(Pontryagin)が、これまた有名な最適制御問題の解法である最大原理(最小原理とも呼ばれる)を発表しました。

最大原理は、解が最適である条件を「簡潔で美しく、かつ解きやすく」表した点が革新的でした。
実は、ポントリャーギンは14歳のときに事故で失明をしています。その後も彼が研究を続けられたのは、母親が彼に参考書や論文を読み聞かせるなど、献身的なサポートをしたためだそうです。だとしても驚異的な頭脳ですね…。
最適制御がもたらした考え方の変化
こうして2つの国で生まれた動的計画法と最大原理は、現在も最適制御の土台として非常に重要な役割を担っています。
「制御の進化」という観点で特に注目したいのは、ここに来て「システムのすべてを数式で表し、それに基づいて制御器を設計する」というアプローチが取られ始めたことです。
それまでの古典制御的な考え方は「こうしたらこうなる」という、システムの入出力情報にのみ注目したものがほとんどでした。
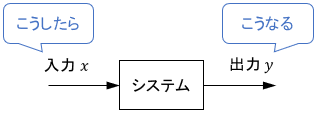
一方、複雑な制御対象に対して文字通り「最適」な解を求めるとなると、入出力に加えてそれが生まれるメカニズム、つまりシステムの内部状態までを考慮する必要が生じたわけですね。
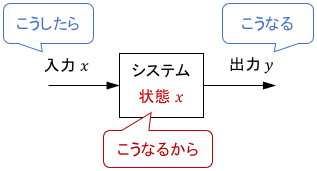
こうして制御の考え方は1段階、複雑で高度なものとなりました。
※上記を含めた古典制御と現代制御の違いについては、こちらのページで詳しく解説していますので、合わせて参考にしてください
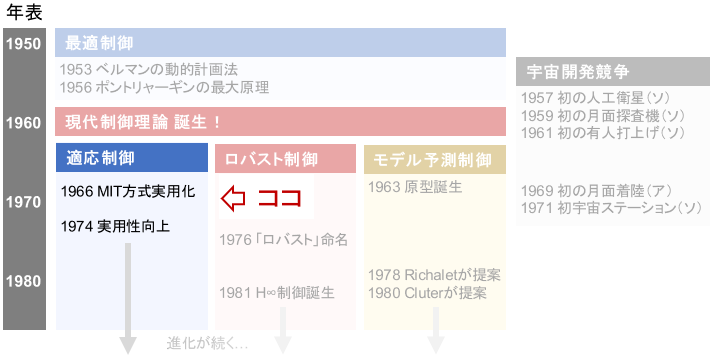
1960年:現代制御の始まり
1960年:カルマンによる現代制御の誕生
新たな制御時代の幕開けが感じられる中、1957年に制御の国際的な学会組織IFAC(International Federation of Automatic Control、国際自動制御連合)が発足します。IFACは現在も制御工学のトップクラスの学会として活動している、権威ある学会です。
1960年、IFACの最初の国際学会がソ連のモスクワで開催されました。
この学会にて、カルマン(Kalman)が現代制御の基礎となる論文「On the General Theory of Control Systems」を発表します。
この論文では、次の内容が体系的にまとめられました。
- 状態方程式を用いたシステムの表現方法
- 状態方程式を用いたシステム特性(可制御性・可観測性など)の解析方法
- 状態方程式を用いた最適制御問題(LQR問題)の解法
つまり、今日の現代制御の原型が初めて現れた記念碑的な論文であり、「この論文にて現代制御が生まれた」とする解釈が一般的です。
また、これにより最適制御は「現代制御の代表的な手法」という立ち位置になりました。
その後もカルマン無双
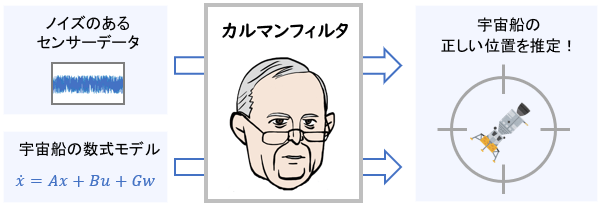
そんな伝説的な論文を出したのも束の間、同年の1960年、カルマンは現代制御を代表する状態推定器であるカルマンフィルタを発表します。
カルマンフィルタは、センサーデータや数式モデルにノイズ(誤差みたいなもん)が含まれても、それらを組み合わせることでシステムの内部状態の真値を推定することを可能としました。
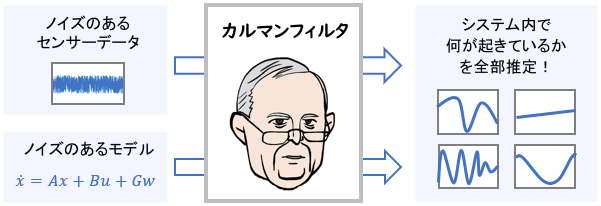
カルマンフィルタは「理論が美しく、性能が高く、実装がしやすい」と3拍子揃っていることから人気が高く、現在も制御にとどまらず、幅広い分野で用いられています。
カルマンはこの後も怒涛のように論文を出し続け、現代制御の基本的な枠組みの多くを作り上げました。そのため、カルマンは「現代制御の父」とも呼ばれています。
1960年~:現代制御の躍進
暗黒時代
現代制御の誕生により、世界は現代制御に大注目!
…と思いきや、当時の実用家たちにはほとんど相手にされなかったそうです。
「システムのすべてを考慮する」という現代制御のアプローチでは、当然理論が複雑になり、開発の手間も増えがちです。
そのため、従来の古典制御的な知識を持つ技術者からは「小難しくてよくわからない、理論のお遊び」だと思われることが多かったそうです。
現代制御の晴れ舞台:アポロ計画
そんな中で潮目が変わったキッカケが、前述の宇宙開発競争です。
絶対に負けられない競争だったにも関わらず、当初のアメリカはソ連に遅れを取っていました。1957年以降、ソ連は宇宙における「史上初」をどんどん実現していきます。
| 時期 | ソ連の実現内容 |
|---|---|
| 1957年8月 | 初のICBM打ち上げ成功 |
| 1957年10月 | 初の人工衛星打ち上げ成功 |
| 1959年9月 | 初の月面探査機派遣 |
| 1961年4月 | 初の有人打ち上げ成功 |
このままでは負けてしまう(というか既に負けている)アメリカは、この状況を打破すべく、起死回生の大勝負に出ました。
1961年5月、当時のケネディ大統領が次のよう宣言します。
今後10年以内に人間を月に送り、安全に地球に帰還させる!
「宇宙開発のゴールは月であり、先に月に言ったほうが勝者だ」ということにして、現状の遅れが決着ではないことを強調したわけですね。
これによって、当時はまだ検討段階だったアポロ計画(月面着陸計画)を、国が全力で支援することとなりました。ここからは、そんな宇宙開発における現代制御の活躍を詳しく見ていきましょう。
現代制御×コンピュータ。最強コンビ結成!
現代制御の相棒として忘れてはいけないのが、同時期に実用化が進んだデジタルコンピュータです。アポロ計画では、制御工学とコンピュータがガッチリとタッグを組むことになりました。

特に最適制御やカルマンフィルタはコンピュータ計算と非常に相性が良かったため、宇宙開発の要として大いに活躍しました。その代表的な例を見てみましょう。
最適制御の活躍:最適な航行軌道と、それへの追従制御
まず最適制御により、宇宙船の飛行時間や燃料消費を最小に抑えつつ目的地に到達させるための最適な航行軌道が計算されました。
軌道が決まると、次は宇宙船をそれに追従して航行させる必要があります。
軌道は地上の強力なコンピュータで事前計算が可能でしたが、航行中の追従制御はアポロ宇宙船内のしょぼいコンピュータで実現する必要があるのが課題でした。その性能は、ファミコンと同じくらいだったそうです。
※演算速度はファミコンとほぼ同じ、RAMはファミコンの倍くらいでした。ちなみにファミコンの発売は1983年で、アポロ計画成功(1969年)の14年後です。
この課題を解決したのも、最適制御でした。最適制御は、アポロ宇宙船の「しょぼコンピュータ」でも計算が間に合うほどコンピュータとの親和性が高く、しっかりと軌道追従の役割を果たしたそうです。
この追従制御、当初はアナログ機器で組まれた制御システムがメインで使われる予定で、コンピュータ制御はそのバックアップという位置づけだったそうです。ただその完成度の高さから、最終的には最適制御が主システムの座を奪い、アナログ制御システムはバックアップに追いやられることになりました。
カルマンフィルタの活躍:宇宙船の位置推定
当然、宇宙船を目標軌道に追従させるためには、そもそも「宇宙船が今どこにいるのか」という情報が不可欠となります。
その情報を得るためには、様々なセンサー情報から、宇宙船の正しい位置を推定する必要がありました。しかし、センサー情報にはノイズがあり、しかも取得が不定期であるのが厄介でした。さらに、これも航行中に宇宙船内の「しょぼコンピュータ」で実現する必要がありました。
これを解決したのが、カルマンフィルタです。カルマンフィルタもコンピュータとの親和性が非常に高く、「センサー情報と宇宙船の数式モデル(運動方程式)を組み合わせて、宇宙船の位置を推定する」という処理を「しょぼコンピュータ」内でしっかり実現しました。
そして来たる1969年、最適制御とカルマンフィルタを搭載したアポロ11号が人類初の月面着陸を達成し、アメリカの巻き返しが成功しました!
アポロ計画という最大の晴れ舞台で活躍した結果、最適制御とカルマンフィルタはその人気と知名度を確固たるものにし、最先端の制御技術として様々な分野に適用されました。
宇宙開発以外での活躍:戦闘機の軌道計算
宇宙開発以外で最適制御が活躍した例も見てみましょう。有名なのが、F-4 ファントムⅡ戦闘機(以下F-4)の最速上昇軌道計算です。

F-4は、冷戦期にアメリカ軍の主力となった超音速戦闘機です。総計5000機以上(超音速戦闘機としてはすごい数)が製造された、傑作機として知られています。
そんなF-4の運用で重要視されたのが、出動の速さです。発進後、すみやかに高速&高高度の戦闘状態に入る必要があったわけですね。このための最適な軌道も、最適制御によって計算されました。
下図は1962年に「地上から最短時間で高度20kmかつマッハ1(=音速)に到達する」という条件で計算された、最速上昇軌道の一例です。

加速しながらまっすぐ上昇するのではなく、「一度高度を落としながら音速以上まで加速し(③)、その後減速しながら上昇する(⑤)」という、直感的にはまず思いつかない解が得られているのが面白いですね。
※ちなみにこのような軌道になるのは、戦闘機が音速を超えると「音の壁」と呼ばれる空力特性の悪化が生じるためだそうです。
後日、アメリカ軍はこの軌道の検証実験を実施します。実験では、副操縦士が高度1000フィートごとの目標速度が書かれた表を持ち、パイロットにそれを読み上げることで軌道が再現されました。
結果、最適制御計算による理論値332秒に対して実績が338秒と、ほぼ同じタイムで目標点に到達することに成功します。これは、熟練パイロットの経験に基づく飛び方よりも大幅に短いタイムだったそうです。すごいですね!

1965年~:適応制御の発展
適応制御の誕生
これらの華々しい活躍を受け、現代制御は戦闘機・戦車・潜水艦など様々な軍用機への適用が検討されました。
…が、なかなか思うような結果が得られませんでした。
例えば戦闘機の飛行制御では「ある飛行条件では良好に制御できても、飛行条件が変わると全然役に立たなくなる」といったケースが多発したといいます。

最大の理由は、数式モデルの誤差でした。前述の通り、現代制御は「システムのすべてを考慮する」というアプローチの理論です。ただ、そもそも「システムのすべてを、あらゆる条件で精度良く再現する数式モデル」を構築することがほとんど困難だったわけですね。
※ちなみにアポロ計画の場合は、宇宙空間には外乱がほとんど無く、運動はほぼ数式に一致するため、上述の問題は起きにくかったそうです。またF-4の軌道計算の場合は、飛行中の細かな機体制御ではなく、あくまで「離陸軌道」の計算だけであったため、うまくいったと言えます。
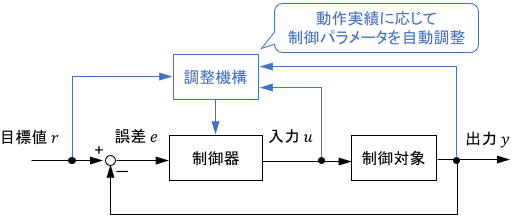
そんな問題を解決するための手法として、適応制御が考案されました。適応制御は、直近の動作実績(システムの稼働状態)に応じて、制御器や数式モデルのパラメータを自動で調整する制御手法です。
適応制御の歴史
適応制御の歴史は結構古く、現在の適応制御の主流であるモデル規範型適応制御(MRAC)の元祖は1958年に発表されています。これはMITの研究者Whitakerらにて研究されたもので、現在はMIT方式と呼ばれています。MIT方式は非常に斬新なものでしたが、実際に制御すると不安定な挙動を示しやすいという欠点がありました。
1966年、Parksがリアプノフの安定解析を応用してMIT方式の欠点を緩和しました。Parksの方法は特定の条件を満たした一部のシステムにしか適用できませんでしたが、それでも適応制御の実用性が格段に向上しました。これを期に、適応制御の研究が本格的に波に乗ってきます。
1974年、Monopoliはシステムの入出力信号のみで適応制御を実現する手法を考案しました。これにより適用できるシステムが一気に広がり、現在の適応制御の基礎が構築されました。
…が、結局適応制御は戦闘機をグイグイ制御するには至りませんでした。
最終的に結果を出し、当時の戦闘機に採用された制御則は、ゲインスケジューリング(状況に応じた制御パラメータを人間が事前に設定する手法)だったそうです。
※複雑な制御対象は高精度なモデルを作りづらいので、難しい制御理論よりも、結局人間の勘と経験でチューニングしたシンプル制御のほうがうまくいくことはよくあります。(このようなケースが生じたとき、高度な制御理論は叩かれがちです…。合掌)
1970年~:ロバスト制御の発展
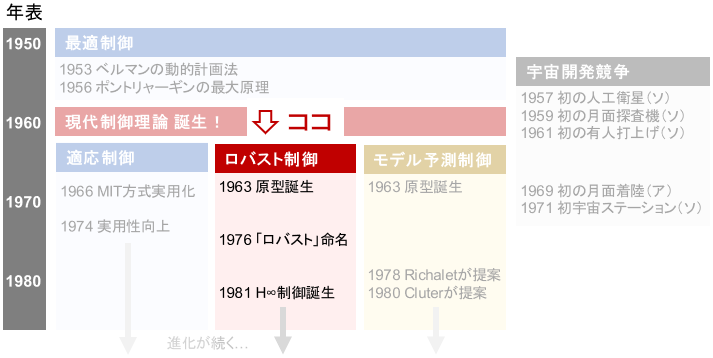
ロバスト制御の誕生
これまでの制御は、「いかに数式モデルの誤差を低減し、完璧に近づけるか」という思想で発展してきました。しかし、戦闘機や潜水艦といった複雑なシステムを高精度にモデル化するには至らず、このアプローチに限界が見え始めてきました。
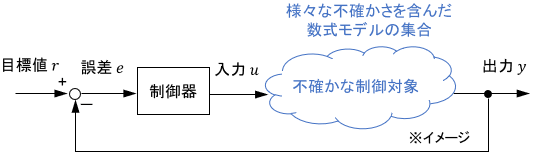
そこで、「数式モデルには必ず誤差が含まれる!モデルが完璧でなくても大丈夫な制御を考えよう!」という思想が誕生しました。これがロバスト制御です。数式モデルに期待するのはやめ、制御器側から「モデルの不確かさ」に歩み寄ろうというわけですね。
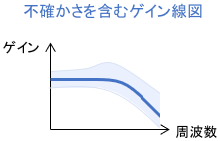
ロバスト制御では、数式モデルに含まれる「不確かさ」の範囲を考慮し、想定される最悪の場合でも安定した結果が得られるよう制御器を設計します。
ロバスト制御の歴史
ロバスト制御の源流は、1963年にHorowitzが出した論文だとされています。ただ、この論文は当時ほとんど注目されませんでした。
1970年以降、MITのAthansやSafonovを中心にロバスト制御の研究が発展していき、徐々に注目を集めました。彼らの1976年の論文にて、「ロバスト」という表現が初めて使われました。
1981年、ZamesがH∞制御を考案します。H∞制御はロバスト制御を代表する手法で、H∞ノルムを使って「不確かさ」の最悪ケースを考慮することが特徴です。

また、H∞制御は古典制御の図式的な設計方法と親和性が高いことから、古典制御にも再度注目が集まりました。
同時期には、特異値μを用いたμ解析法や、LMI(線形行列不等式)を用いた制御など、今日のロバスト制御の核をなす理論が続々と考案され、「ロバスト制御」という制御の1ジャンルが確立されました。
1980年~:モデル予測制御の発展
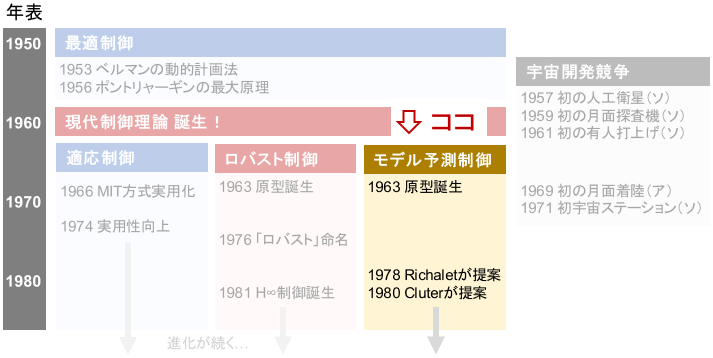
1980年あたりから、プロセス制御(大規模プラントの制御)の分野で、新しい制御手法が提案されます。モデル予測制御です。
1978年にRichalet、1980年にCluterが、それぞれ独自に化学プラント用の制御法としてモデル予測制御を考案しました。
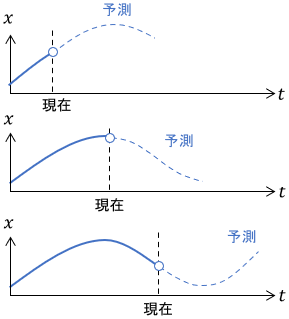
モデル予測制御は、現在を開始点として、少し将来までの最適制御問題を制御中に解き続けることで最適フィードバック制御を実現する手法です。
最適制御は計算負荷が高いため、リアルタイムでイチから素早く解くことが難しいのですが、Richaletらが対象とした大規模化学プラントは反応速度が非常にゆっくりだったので、当時のコンピュータでも十分に計算が間に合ったそうです。
これらの研究の成功により、モデル予測制御の高い実用性が証明され、モデル予測制御への注目が一気に高まりました。
Richaletは、自身がモデル予測制御を発明したと主張し、特許化を試みました。しかし、実は同様の概念が1963年に既に発表されていることが判明し、却下されました。
Richaletはこれについて、1987年の国際学会IFACにて次のように言い訳(?)しています。
モデル予測制御を発明したのは誰か?神だ。モデル予測制御は発明されたのではなく、発見されたに過ぎない。ただ、神には伝道師が必要であったのだ(それが私だ)
ともあれ、このおかげで様々な技術者がモデル予測制御を使えるようになりました。
その後のコンピュータの進化とも相まって、モデル予測制御はメキメキと実用性を向上させ、制御の1ジャンルとして確固たる地位を築き上げました。
現在では反応が遅いプラントだけでなく、ロボットや車など幅広いジャンルで活躍しています。

以上、1980年ごろまでの現代制御の歴史でした。
制御の世界には、ここで紹介したもの以外にも様々な手法が存在します。以下の記事では、ここで紹介しきれなかった手法も説明していますので、合わせてチェックしてみてくださいね!

参考文献(歴史系の記事共通)
- R. E. Kalman『On the General Theory of Control Systems』(1960年)
- A. E. Bryson, W. F. Denham『A Steepest-Ascent Method for Solving Optimum Programming Problems』(1962年)
- R. J. BACKUS『The Defense of Antwerp Against the V-1 Missile』(1971年)
- Bernard D. Holbrook『A History of Computing Research at Bell Laboratories (1937-1975)』(1982年)
- 示村 悦二郎『自動制御とは何か』(1990年)
- David A. Mindell『Automation’s Finest Hour: Bell Labs and Automatic Control in World War II』(1995年)
- Arthur E. Bryson Jr.『Optimal Control – 1950 to 1985』(1996年)
- Stuart Bennett『A Brief History of Automatic Control』(1996年)
- 鈴木 真二『最適制御は航空機を救えるか』(1996年)
- 荒木 光彦, 須田 信英『PID制御の歴史』(1997年)
- 足立修一, 大須賀公一『システム制御へのアプローチ』(1999年)
- David A. Mindell『Automation’s Finest Hour: Radar and System Integration in World War II』(2000年)
- 大嶋 正裕『モデル予測制御ー理論の誕生・展開・発展ー』(2000年)
- Petar Kokotovic, Murat Arcak『Constructive nonlinear control: a historical perspective』(2001年)
- 原 辰次『ロバスト制御理論の回顧と展望』(2001年)
- 木村 英紀『制御工学の考え方』(2002年)
- 大嶋 正裕, 小河 守正『モデル予測制御一Ⅰ一基礎編:発展の歴史と現状』(2002年)
- Michael G. Safonov『Origins of robust control: Early history and future speculations』(2012年)
- 宮里 義彦『適応制御の回顧と展望』(2013年)
- Ernie Hayden, Michael Assante, Tim Conway『An Abbreviated History of Automation & Industrial Controls Systems and Cybersecurity』(2014年)
- Karl Astrom『History of Adaptive Control』(2014年)
- Sreenatha G. Anavatti, Fendy Santoso, Matthew A. Garratt『Progress in Adaptive Control Systems: Past, Present, and Future』(2015年)
- Jamshed Iqbal, Mukhtar Ullah, Said Ghani Khan, Baizid Khelifa, Saša Ćuković『Nonlinear control systems – A brief overview of historical and recent advances』(2017年)
- 岩田 隆敬『宇宙分野におけるカルマンフィルタの応用』(2017年)
- 足立 修一『古くて新しいカルマンフィルタ』(2017年)
コメント