
制御について調べてみたけど「〇〇制御」ってのが多すぎて、どれがなんなのか分からん…
という問題を解決するために、本ページでは「〇〇制御」という名前で分類されている制御ジャンルと、それぞれの関係性について解説します。これを読むと、制御工学の全体像がイメージできるようになりますよ!
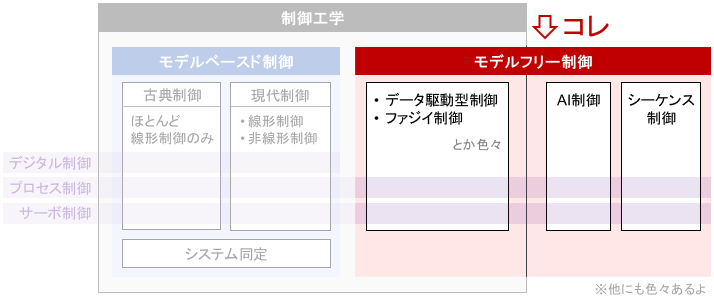
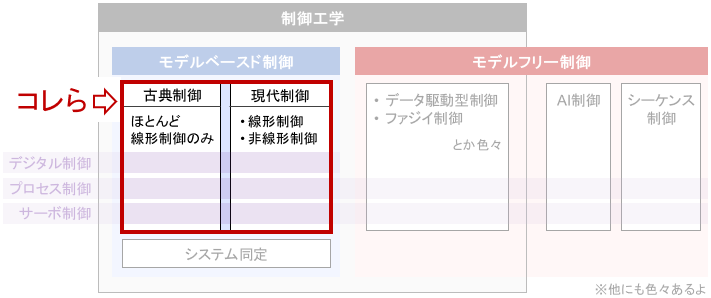
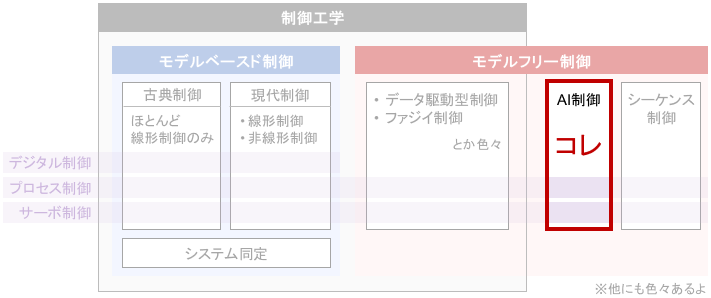
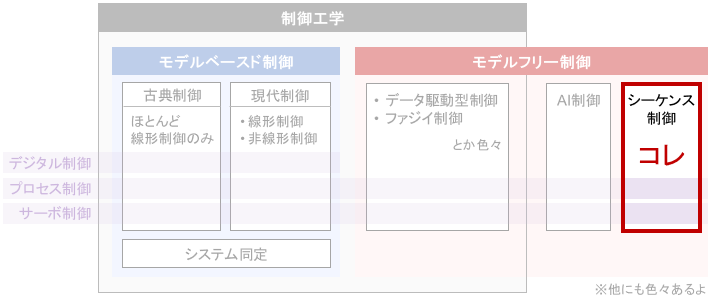
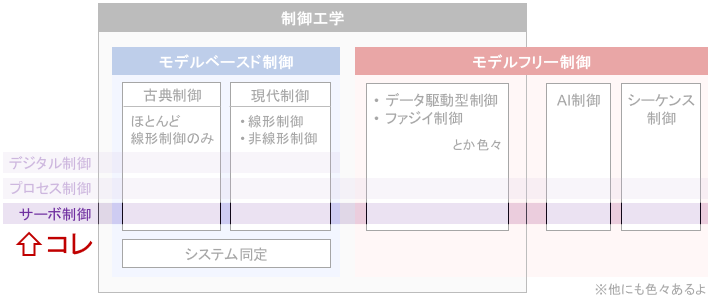
制御の全体像:
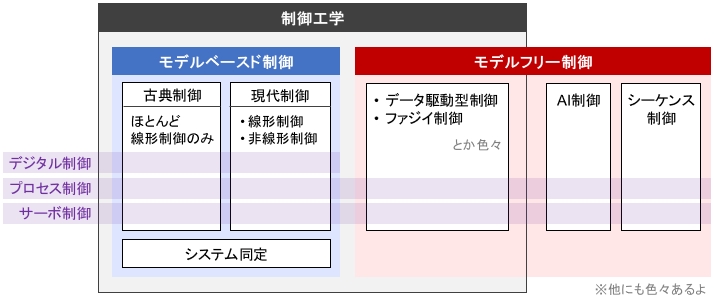
※制御のジャンルは音楽のジャンルと同様に、絶対的な境界線があるわけではありません。以下では「ほとんどの制御屋さんにとって違和感のない分類」を紹介しますが、「人によって細かな違いは生じうる」ということにご留意ください。
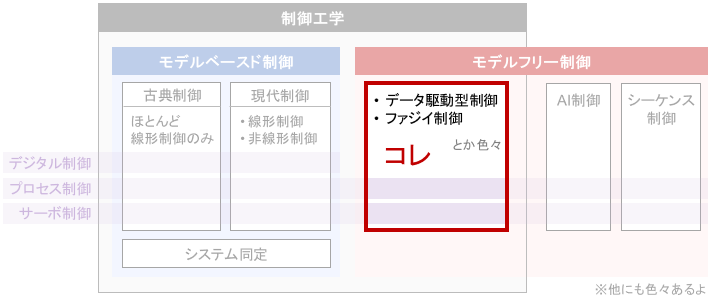
大分類:モデルベースド制御とモデルフリー制御
まず大分類としてモデルベースド制御とモデルフリー制御を抑えておくと、全体のイメージがしやすくなるでしょう。
モデルベースド制御
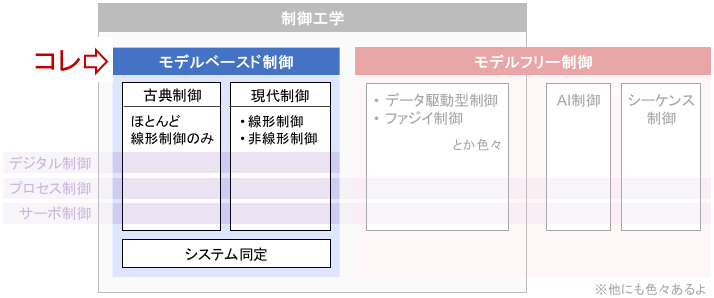
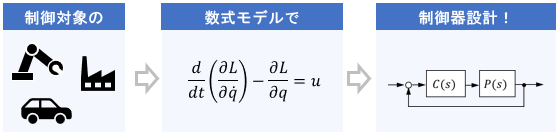
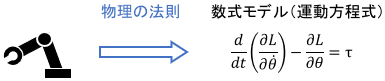
モデルベースド制御は、制御対象の特性を表す数式モデルを作成し、それに基づいて制御器を設計する手法です。モデルベースド制御は、まさに制御の王道と言えるでしょう!
モデルベースド制御の利点としては、モデルに基づいて数学的に制御器を設計できるため、高い制御性能を実現しやすいことが挙げられます。
一方の欠点としては、制御対象のモデルを作成する必要があることと、モデルの精度が悪いと制御性能も低下してしまうことが挙げられます。
実際のところ、制御対象を完璧に表したモデルを作ることはほぼ不可能です。よって、制御目的に合わせて情報を省いたり近似したりしながら、制御対象のエッセンスを適切に抽出したモデルを作ることが必要となります。
設計者は、制御器設計だけでなくモデリングのセンスも問われるわけですね。
※そのあたりも含めたモデルベースド制御開発の流れについては、こちらのページをご覧ください。
モデルフリー制御
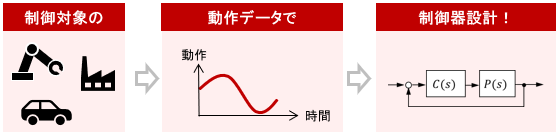
一方のモデルフリー制御は、制御対象のモデルを用いずに制御器を設計する手法です。「こう操作したらこう動いた」という、制御対象の動作データを手がかりにすることがほとんどです。
※ちなみに、モデルフリー制御は「制御対象のモデル」に基づかないというだけで、最終的に作られた制御器は何らかの数式(つまりモデルみたいなもの)によって表されます。
モデルフリー制御の利点としては、その名の通り制御対象のモデルが不要であることが挙げられます。
一方の欠点としては、モデルベースド制御と比べると高い制御性能を出しにくいことが挙げられます。
「モデルの精度が悪いからモデルフリー制御にしてみたけど、結局ダメダメモデルを使ったモデルベースド制御のほうが良い性能が出た」ということもよくあります。
よって実際のところは「モデル作成が面倒」という理由よりは、次のような「そもそも問題をモデルに基づいて考えるのが難しい」という理由で用いられることがほとんどです。
- 人間の勘と経験に基づく熟練の技を制御で再現したい
- モデルの精度があまりにも悪すぎる。ヒドい。本当にヒドい
- 本質的に、制御対象の特性が数式で表せるようなものではない
モデルベースド制御に含まれるジャンル
古典制御と現代制御
制御の王道であるモデルベースド制御の二大巨塔が、古典制御と現代制御です。制御工学という学問は、この2ジャンルを基礎としています。
古典制御はシステムを周波数に基づいて分析するのに対し、現代制御は時間に基づいて分析するのが大きな違いです。
基本的に現代制御のほうができることが多くて高性能ですが、古典制御には周波数解析や安定余裕解析といった独自の強みがあります。
それぞれを様々な観点で比較したのがこちらの表です。
| 古典制御 | 現代制御 | |
|---|---|---|
| 主な計算手段 | 手計算 | コンピュータ計算 |
| 扱える入出力数 | 1入力1出力のみ | いくつでもOK |
| 扱えるシステム | 線形時不変システムのみ | だいたい何でもOK |
| 扱う変数領域 | s領域(周波数領域) | t領域(時間領域) |
| システムの表現 | 伝達関数 | 状態方程式 |
※より詳細な比較については、こちらのページをご覧ください
※また、古典制御や現代制御の中にも「〇〇制御」と呼ばれる様々な手法(中ジャンル)が存在します。詳しくは、こちらの続編をご覧ください
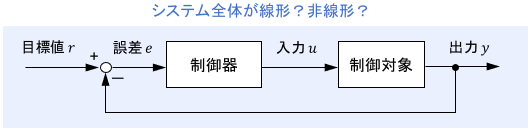
線形制御と非線形制御
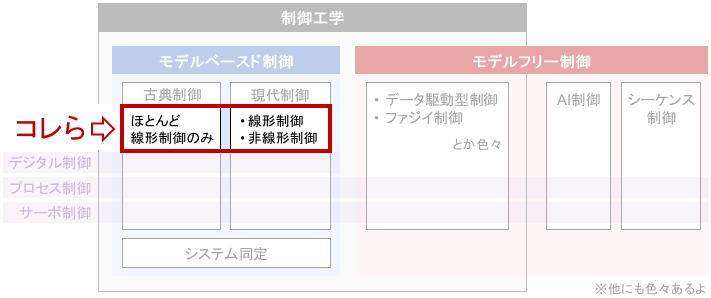
これは古典制御・現代制御とは違った観点でのジャンル分けです。
制御システム全体が線形システムとして表される制御手法が線形制御、そうでないものが非線形制御です。
※線形システムとは、数式モデルが「係数×入出力(の微分)」の項だけで表されるシステムのことです。詳細については、こちらのページをご覧ください
線形制御はシンプルで設計しやすいのが利点ですが、線形システム(つまり比較的単純なシステム)しか扱えないのが欠点です。
反対に非線形制御はほぼすべてのシステムを扱えるのが利点ですが、複雑で設計しにくいのが欠点です。
なお、古典制御と現代制御の基礎理論はすべて線形制御で成り立っています。一方の非線形制御は、ほぼ全てが現代制御の応用分野であり、古典制御ではほとんど扱いません。
デジタル制御
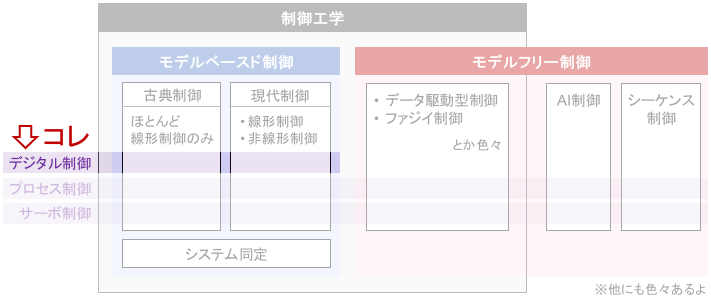
これも上述のものとは違った観点でのジャンル分けです。
デジタル制御は、コンピュータによる制御を前提として、それ用に設計された制御手法のことです。
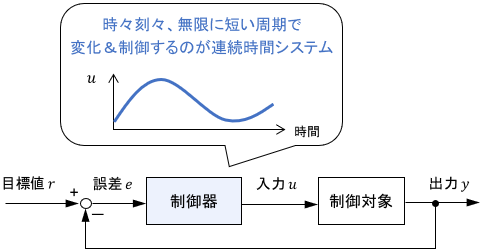
例えば、古典制御や現代制御の基礎理論は、全て連続時間システムを前提としています。連続時間システムでは「システムの状態は時々刻々無限に短い周期で変化し、制御器もそれに合わせて無限に短い周期で制御入力を更新する」という動作が前提とされます。
一方、コンピュータは「無限に短い周期」ではなく「一定の周期」でしか制御入力を更新できません。いくら高性能なCPUでも、無限に短い周期でプログラムを走らせることはできませんからね。
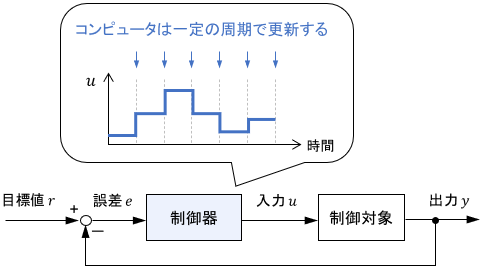
よってコンピュータを用いて制御する場合は、「一定の周期でしか制御入力を更新できない」という前提のもとで、制御則を考える必要があります。それがデジタル制御というわけですね。
ちなみに古典制御・現代制御・線形制御・非線形制御を問わず、上記の前提のもとで設計されたものであれば、それはデジタル制御に分類されます。
※定義的には「デジタルでモデルフリーな制御」もありえますが、一般的には「デジタル制御」と言えばモデルベースド制御のみを指します。
システム同定
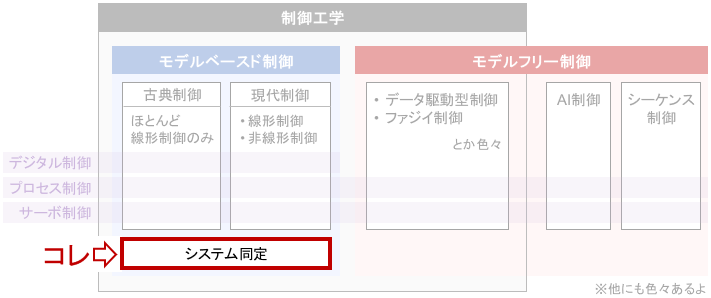
システム同定は、モデルベースド制御の命であるモデリング(とその周辺技術)に関する分野です。
モデルを作成するためのアプローチは、主に次の3つに分類されます。
- ホワイトボックスモデリング:既存の物理法則から数式を組み立て、数式モデルとする方法。「第一原理モデリング」とも呼ばれる
- ブラックボックスモデリング:制御対象の動作データからその特徴を抽出し、数式モデルとする方法

- グレーボックスモデリング:上記の組み合わせ。ホワイトボックスモデリングで表現しきれなかった部分を、ブラックボックスモデリングでカバーする方法
基本的には、これらのアプローチによるモデリング技術全般がシステム同定の領域だと思っておけばOKです。
ただ上記のうち、特にブラックボックスモデリングのための手法が(狭義の)システム同定とされることもあります。
結局「システム同定」が示す範囲には様々な解釈があるわけですが、とにかくモデル作成に行き詰まったら、システム同定技術について調べてみるとよいでしょう。
モデルフリー制御に含まれるジャンル
制御工学におけるモデルフリー制御
続いて、モデルフリー制御を見ていきましょう。まずは、制御工学の枠組みに含まれるモデルフリー制御手法を紹介していきます。
※ここで紹介する2つの制御は「制御の大ジャンル」というよりは「中ジャンル(制御手法の一種)」という感じなので、そのイメージで読み進めてください。(モデルフリー制御の雰囲気が分かる代表例として紹介しています)
データ駆動型制御
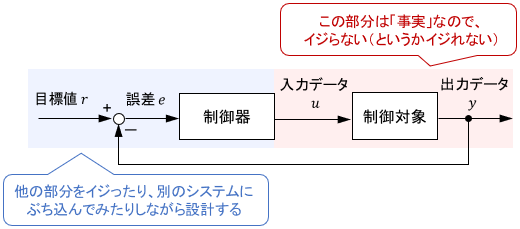
データ駆動型制御は、制御対象の数式モデルではなく、動作データを手がかりに制御器を設計する手法です。
数式モデルを使わないということは、動作データのみが制御対象を表す情報(かつ紛れもない事実!)ということになります。
よって、その部分は「事実」として一切イジらず、その他の部分を色々とイジることで、制御器を設計する、といったイメージの手法です。
詳細は長くなるので省きますが、本来なら数式モデルが必要となる部分を、動作データだけでうまく代替できる形に問題を変換することが、理論的なポイントとなります。
ファジイ制御
ファジィ制御は、「こういうときはこう操作したらいい感じに制御できる」というような人間のシンプルな経験則を、制御器で再現させることを目指した制御です。
1980年代後半から90年代にかけて流行し、ファジィ制御を搭載した様々な家電が売られたり、仙台市の地下鉄がファジィ制御で自動運転されたりしました。
方法としては、まず人間の知識をルールに落とし込みます。車の運転でいうと、次のようになります。
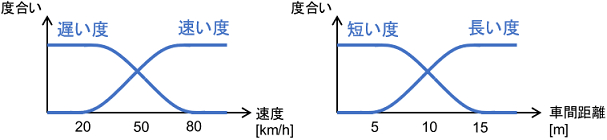
- 「車が遅い」かつ「車間距離が短い」なら「速度そのまま」
- 「車が遅い」かつ「車間距離が長い」なら「速度上げる」
- 「車が速い」かつ「車間距離が短い」なら「速度下げる」
- 「車が速い」かつ「車間距離が長い」なら「速度そのまま」
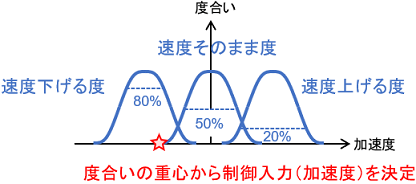
次に、判断基準となる「車の速度」や「車間距離」の「度合い」を数値でざっくりと表す、メンバーシップ関数を定義します。
あとは制御中に、「現在の状態が上記ルールそれぞれにどれくらい当てはまっているか」という適合度を、メンバーシップ関数を用いて算出します。
例えば今現在の適合度が、それぞれ次のように出たとする。
- 「車が遅い」かつ「車間距離が短い」なら「速度そのまま」:適合度30%
- 「車が遅い」かつ「車間距離が長い」なら「速度上げる」 :適合度10%
- 「車が速い」かつ「車間距離が短い」なら「速度下げる」 :適合度80%
- 「車が速い」かつ「車間距離が長い」なら「速度そのまま」:適合度20%
最後に、適合度に応じてそれぞれの操作(上でいう速度の操作)に重み付けを行い、制御入力を決定します。
※上記は一例であり、他にも様々なファジィ制御則が提案されています。ちなみにファジィ制御は、同時期に流行したAI技術であるニューラルネットワークや遺伝的アルゴリズムとともに一括りにして、「制御工学というよりはAI制御の一種」とする解釈もあります。
AIによる制御
近年目覚ましい発展を続けているAI技術を用いた制御手法も、数多く提案されています。
AI技術を用いたモデルベースド制御もあるにはありますが、AIが本領を発揮しているのはモデルフリー制御の領域です。
先ほど、モデルフリー制御を使う主な理由として「勘と経験に基づいた人間の知識を再現したい」というものを挙げましたが、これがまさにAI技術の得意分野ですからね!
上で紹介したファジィ制御も同様の目的で使われますが、AI制御は暗黙知と呼ばれる「本人でも説明できないような絶妙な判断基準」をも学習できる点が優れています。
代表的なAI制御手法としては、強化学習や深層学習を用いたものが挙げられます。どちらもAIの大ジャンルの1つであり、具体的な手法が様々に提案されています。
※一般に「AIを用いた制御」と「制御工学」は別分野とされがちですが、「制御」という大きな観点で見ると、どちらも「制御の1ジャンル」くらいの違いでしかありません。AI制御と制御工学の関係性については、こちらのページで詳しく解説していますので、合わせてご覧ください。
シーケンス制御
シーケンス制御は、スイッチのON/OFFに基づいた単純な制御方式です。
これまで見てきたような物理量の制御ではないので、制御工学の枠組みにはあまり含まれません。あえて分類するならモデルフリー制御ですが、モデルフリー制御の一種だともあまり考えられていません。
※「制御工学理論」に含まれないだけで、「制御するための工学」という広義の「制御工学」には含める場合もあります(そもそも「制御工学」という言葉の範囲が曖昧なので、このあたりも曖昧)。
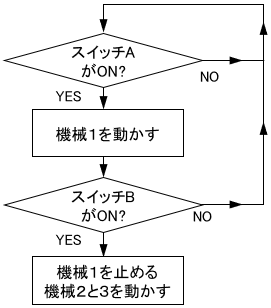
シーケンス制御は、次のように対象の動作の流れ(=シーケンス)を制御する場合に用いられます。
- スイッチAが押される
- 機械1が動く
- 機械1が仕事を終えると、スイッチBが押される
- 機械1が止まり、機械2と3が動く
「もしこうなったら、こうする」という、いわゆるIF-THENルールに基づいてスイッチを切り替え、ものを動かす手法だとも解釈できます。
当初、こういったシーケンスはリレーを用いた回路でアナログ的に実現されていました。1970年代以降は、シーケンスをソフト上でプログラムできるPLC(プログラマブル・ロジック・コントローラ)が普及し、広く使用されています。
プログラムといっても、ラダー回路と呼ばれる、アナログのリレー回路と同様のものをソフト上で組み立てるだけなので、制御やプログラミングの高度な知識を必要としないのが利点です。
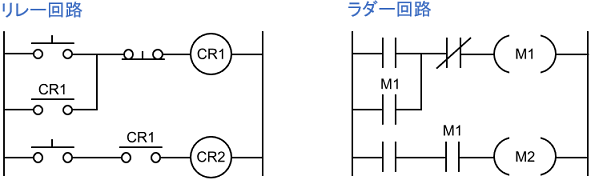
簡単に実装できるので、工場設備のちょっとした自動化などに非常に多く用いられています。身近な例では、自動販売機や自動ドアなんかが、シーケンス制御で実現されています。
制御対象によるジャンル分け
ここからは、モデルベース度制御・モデルフリー制御とは違った観点でのジャンル分けについて紹介していきます。
プロセス制御
プロセス制御は「大量の何かを作る工場(生産プロセス)を動かすための制御」です。
具体例としては、鉄鋼などの材料プラントや、化学プラント、電力プラントの制御が挙げられます。
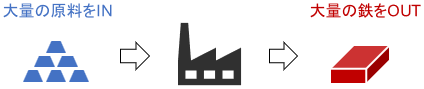
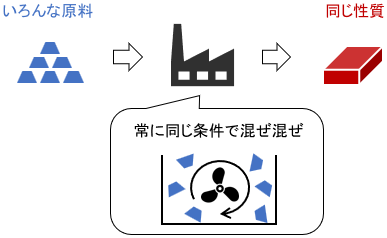
プラント内の生産プロセスでは、同じ品質のものを大量に作り続けることが重要視されます。
しかし生産プロセスには、原料の特性変化、機械の劣化、天候変化などが外乱として作用します。それらの影響を吸収し、原料の比・温度・圧力・混ぜる速度といった稼働条件を一定に制御するのがプロセス制御の役割だというわけです。
またプラントは、ちょっと一時停止するだけでも多大な時間とコストがかかってしまいます。そのため生産プロセスでは、不具合なく24時間ノンストップで稼働させ続けることも重要視されます。

以上のことから、プロセス制御での優先順位は次のようにまとめられます。
- 優先順位1:安全性と法令遵守。危険な操業をしない。有害物質を出さない。
- 優先順位2:安定操業。とにかくプロセスを止めない。不具合を出さない。
- 優先順位3:高性能化。品質向上や、製造効率の向上。
一般的な機械制御や電気制御と比べると、非常に保守的な「守りの制御」であると言えるでしょう。
サーボ制御(サーボ系)
サーボ制御は、物体の位置や速度や姿勢(角度)を制御し、好きに動作させるための制御のことです。
ご主人の指令通りに物体を動かすので、英語で「召使い」を意味する “servant” から「サーボ制御」という名前がつけられたそうです。
※一般的には、「サーボ制御」よりも「サーボ制御するシステム」を表す「サーボ系」という言葉のほうがよく使われます。
またサーボ制御は、物体の動作制御に限ることなく、より広義に「変動する目標値に対する追従制御」という意味で用いられることもあります。
ちなみに、目標値が変わらない定値制御のための制御手法は、レギュレータと呼ばれます。
「〇〇制御」の使われ方
以上が、主な制御ジャンルについての解説です。
ここまで紹介してきた「〇〇制御」は排反なものではなく、場合によっては複数の「〇〇制御」が共存することになります。ただ、それぞれを組み合わせて使うことはほとんどありません。
例えば、生産プロセスに対してコンピュータで非線形な現代制御理論を適用すると「プロセスでデジタルで非線形な現代制御理論」を使うことになりますが、「プロセスデジタル非線形現代制御」とは言いません。
これをあえて一言で説明するなら、「非線形の現代制御理論を用いたコンピュータ制御によって、プロセス制御を実現する」といった感じになります。
以上、制御の主要ジャンルについての解説でした!
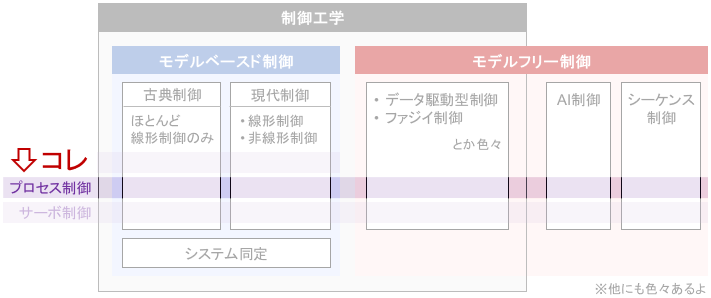
最後に制御の全体像を再掲しておきます:
コメント