

このページでは、PID制御器のプログラム例と、その考え方を詳しく解説します。
※PID制御の基礎を未学習の方は、まずこちらのページをご覧ください

動作条件
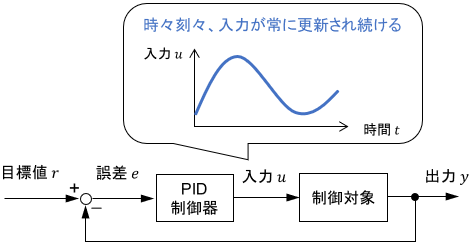
まず、前提となるシステム構成を確認しておきましょう。次のようなブロック線図で表される、PID制御システムを考えます。

このシステムにおける制御入力$u$は、PID制御器によって次式で計算されるのでしたね。
$$u(t) = \ubg{K_P\ e(t) \vphantom{K_I \int ^t _0 e(\tau) d\tau}}{比例\ P} + \ubg{K_I \int ^t _0 e(\tau) d\tau}{積分\ I} + \ubg{K_D\ \dot{e}(t)\vphantom{K_I \int ^t _0 e(\tau) d\tau}}{微分\ D}$$
$K_P,K_I,K_D$は、それぞれP・I・Dゲインです。上式を使うと、いかなる時刻$t$に対しても、そのときの入力$u(t)$が導出可能となります。
ただ、逆に言うと、これを厳密に実現させるには、無限に短い周期で入力を更新し続ける必要があることになります。
今、PID制御をプログラムで実現させようとしているので、そんなことは実現不可能ですよね。いくら高性能なCPUでも、無限に短い周期でプログラムを走らせることはできません。
よって、プログラムによって現実のシステムを制御する際は、次のように一定の制御周期ごとに入力を更新する構成をとることがほとんどです。
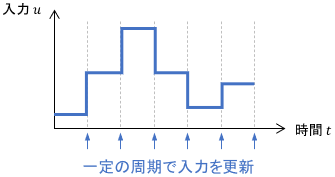
次の制御周期が来るまでの間は、制御器は何もできないので、上図のように入力を一定に保持しておくのが一般的です。
※このように入力を一定に保持することは、制御用語で0次ホールドと呼ばれます。ちなみに、0次ホールドされることを見越して適切な制御入力を計算する、デジタル制御と呼ばれる制御手法も長く研究されています。
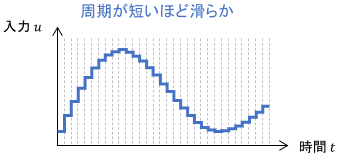
とりあえずは、制御周期を小さくすればするほど、本来の式に近い制御が達成できるとイメージしておけばOKです。
ただし、制御周期内でプログラム上のすべての演算を終わらせる必要があるため、システムに求められる要件は厳しくなります(例えば高いCPUスペックか、少ない演算量が必要となる)。
とはいえPID制御の場合は、制御周期を小さく設定しても問題になることはほとんどありません。すぐ後で示すようにプログラムが数行で済むので、短い周期でも演算が間に合うことがほとんどだからです。
制御周期の適正値は、対象システムの特性や要求性能しだいですが、例えば機械システムなら1~10msくらいを想定しておけばよいでしょう。
PID制御器のプログラム例
それでは、プログラムを具体的に見ていきましょう。
まずはコアとなるPID制御器のプログラムです。これは次式を計算するだけなので、結構簡単に実装できます。
$$u(t) = \ubg{K_P\ e(t) \vphantom{K_I \int ^t _0 e(\tau) d\tau}}{比例\ P} + \ubg{K_I \int ^t _0 e(\tau) d\tau}{積分\ I} + \ubg{K_D\ \dot{e}(t)\vphantom{K_I \int ^t _0 e(\tau) d\tau}}{微分\ D}$$
// 下記変数は既に与えられているものとする // y : 現在の出力 // r : 現在の目標値 // e_pre : 前回の誤差 // T : 制御周期 // KP,KI,KD: P,I,Dゲイン // PID制御の式より、制御入力uを計算 e = r - y; // 誤差を計算 de = (e - e_pre)/T; // 誤差の微分を近似計算 ie = ie + (e + e_pre)*T/2; // 誤差の積分を近似計算 u = KP*e + KI*ie + KD*de; // PID制御の式にそれぞれを代入
※本ページではC言語っぽい形でプログラムを記述していますが、他の言語でもロジック自体は同じです(以降も同様)。
かなりシンプルですね。これを制御周期ごとに呼び出せば、各時刻における制御入力が求まるというわけです。
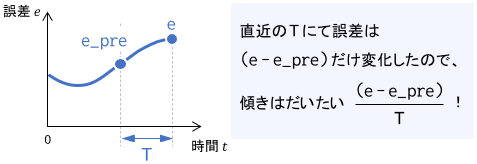
なお、Dの項に含まれる誤差の微分$\dot{e}(t)$(変数でいうと de)は、次のように数値微分で近似的に求めています。
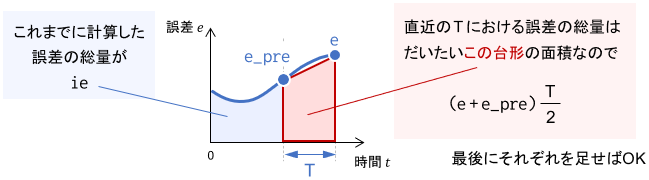
また、Iの項に含まれる誤差の積分$\int ^t _0 e(\tau) d\tau$(変数でいうと ie)は、次のように数値積分で近似的に求めています。
これらの近似には必ず誤差が含まれてしまいますが、制御周期を十分小さくとっていれば、実用上問題になることはほとんどありません。
全体プログラム(お手軽版)
上記プログラムに、各種変数を取得(または定義)するプログラムも追加して、全体像を把握しましょう。
// 定数設定 ===============
KP = 20; // Pゲイン
KD = 5; // Dゲイン
KI = 1; // Iゲイン
T = 0.01;// 制御周期[秒]
// 変数初期化 ===============
e_pre = 0; // 微分の近似計算のための初期値
ie = 0; // 積分の近似計算のための初期値
// メインループ ===============
while(1){
// 制御周期分だけ待つ処理
sleep(T);
// 現時刻における情報を取得
y = get_y(); // 出力を取得。例:センサー情報を読み取る処理
r = get_r(); // 目標値を取得。目標値が一定ならその値を代入する
// PID制御の式より、制御入力uを計算
e = r - y; // 誤差を計算
de = (e - e_pre)/T; // 誤差の微分を近似計算
ie = ie + (e + e_pre)*T/2; // 誤差の積分を近似計算
u = KP*e + KI*ie + KD*de; // PID制御の式にそれぞれを代入
// 制御入力をシステムに与える処理
give_u(u); // 例:モーターに電流を流す処理
// 次のために現時刻の情報を記録
e_pre = e;
}
プログラム内の処理の詳細は、コメントに書いてある通りです。
sleep()、get_y()、get_r()、give_u()といった関数は、対象システムや使用言語に応じて書き換えてくださいね。
全体プログラム(細かい所までちゃんとしてる版)
上記プログラムは分かりやすさを重視したものなので、制御性能の向上や、理論的な正確性という観点ではちょっぴり改善の余地があります。(そのままでも結構ちゃんと動いてくれますが)
ここからは、それらを反映したマイナーチェンジ版や、設計時の考え方について詳しく紹介していきましょう。
時間待ち処理
先ほどのプログラムでは、単純に制御周期分だけ待機することで、周期的な制御を実現していました。
// メインループ ===============
while(1){
// 制御周期分だけ待つ処理
sleep(T); コレ
︙
ただし、これでは実質的な周期が「プログラムの処理時間+待機した時間」となり、設定した制御周期が厳密には実現できないことに注意が必要です。
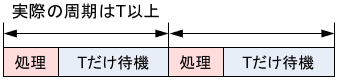
前述の通りPID制御の計算は時間がかからないため、「ほぼ一瞬」とみなせば、正直そこまで大きな問題にはなりません。
ただし、例えばセンサー情報の取得など、PID制御以外の処理に時間がかかる場合は、制御周期が意図したものからズレてしまいます。
このような問題を防ぐためには、実際に時間を計測し、次のように処理時間も含めて制御周期を考慮するプログラムを書けばOKです。
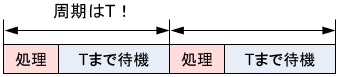
上記を反映したプログラムがこちらです。(変更部分をオレンジで囲んでいます)
// 定数設定 =============== KP = 20; // Pゲイン KD = 5; // Dゲイン KI = 1; // Iゲイン T = 0.01;// 制御周期[秒] // 変数初期化 =============== e_pre = 0; // 微分の近似計算のための初期値 ie = 0; // 積分の近似計算のための初期値 // メインループ ===============timer_start(); // 時間の計測を始める関数。timer_now()で計測値取得 while(1){ // 制御周期分だけ待つ処理 while(timer_now() < T); // 制御周期分の時間が経つまで待つ timer_start(); // 時間の計測を再び0から開始// 現時刻における情報を取得 y = get_y(); // 出力を取得。例:センサー情報を読み取る処理 r = get_r(); // 目標値を取得。目標値が一定ならその値を代入する // PID制御の式より、制御入力uを計算 e = r - y; // 誤差を計算 de = (e - e_pre)/T; // 誤差の微分を近似計算 ie = ie + (e + e_pre)*T/2; // 誤差の積分を近似計算 u = KP*e + KI*ie + KD*de; // PID制御の式にそれぞれを代入 // 制御入力をシステムに与える処理 give_u(u); // 例:モーターに電流を流す処理 // 次のために現時刻の情報を記録 e_pre = e; }
時間を計測するための関数 timer_start() や timer_now() は、対象システムや使用言語に応じて書き換えてください。
微分計算
続いては、微分計算についてです。
前述のように数値微分そのものに大きな問題はないのですが、上記プログラムでは「前回計算した誤差」を表す変数 e_pre の初期化に少し問題があります。
プログラムの最初の段階では、e_preは「制御開始時点での誤差」を表すわけですが、それを簡易的に0としていましたね。
// 変数初期化 ===============e_pre = 0; // 微分の近似計算のための初期値ie = 0; // 積分の近似計算のための初期値
ただ、制御開始時点での誤差は常に0であるとは限りません。よって、実際の誤差を計算し、それを用いて初期化するように変更しましょう。(下記のオレンジの部分です)
// 定数設定 =============== KP = 20; // Pゲイン KD = 5; // Dゲイン KI = 1; // Iゲイン T = 0.01; // 制御周期[秒] // 変数初期化 =============== ie = 0; // 積分の近似計算のための初期値設定// 微分の近似計算のための初期値をより適切に設定 y = get_y(); // 出力を取得 r = get_r(); // 目標値を取得 e_pre = r - y; // 誤差を計算// メインループ =============== timer_start(); // 時間の計測を始める関数。timer_now()で計測値取得 while(1){ // 制御周期分だけ待つ処理 while(timer_now() < T); // 制御周期分の時間が経つまで待つ timer_start(); // 時間の計測を再び0から開始// 現時刻における情報を取得 y = get_y(); // 出力を取得。例:センサー情報を読み取る処理 r = get_r(); // 目標値を取得。目標値が一定ならその値を代入する // PID制御の式より、制御入力uを計算 e = r - y; // 誤差を計算de = (e - e_pre)/T; // 誤差の微分を近似計算 ie = ie + (e + e_pre)*T/2; // 誤差の積分を近似計算 u = KP*e + KI*ie + KD*de; // PID制御の式にそれぞれを代入// 制御入力をシステムに与える処理 give_u(u); // 例:モーターに電流を流す処理 // 次のために現時刻の情報を記録 e_pre = e; }
上記では、分かりやすさのためにオレンジと緑の部分でほぼ同じ処理を2回書いていますが、この部分を関数としてまとめれば、よりデバッグ効率を上げられるでしょう。
// 以下の処理を関数にまとめ、eとe_preの計算に使うとなおよい y = get_y(); // 出力を取得 r = get_r(); // 目標値を取得 e = r - y; // 誤差を計算して返す
積分計算
「誤差の積分値」を表す変数 ie の初期値は、とりあえず0にしておけば暴走することはありません。ただ、場合によっては0以外に設定したほうが制御性能を上げられることは覚えておきましょう。
// 変数初期化 =============== ie = 0; // 積分の近似計算のための初期値設定
例えば制御開始直後にシステムに大きな外乱が加わる場合は、ie をその外乱と釣り合うくらいの値で初期化しておけば、制御初期の外乱の影響を低減できます。
※詳しくはこちらのページの最後の方の「Iの項の初期値を設定する」という項目で解説していますので、合わせてご覧ください。

変数の記録
上記を反映させればPID制御がしっかり動いてくれるはずですが、後で制御結果を評価・分析するために、必要に応じて各種変数を配列などに記録&保存する処理を追加しておくと良いでしょう。(このあたりの書き方は言語によるので、具体例は省略します)
最低でも各時刻での入出力信号は記録しておき、後は必要に応じて誤差やPID各項の値などを控えておくとよいでしょう。
※制御結果の分析方法(どのデータをどう見るか)については、こちらのページにまとめていますので、参考にしてください。

ここまでの変更点を全て反映させると、プログラムは次のようになります。
// 定数設定 ===============
KP = 20; // Pゲイン
KD = 5; // Dゲイン
KI = 1; // Iゲイン
T = 0.01; // 制御周期[秒]
// 変数初期化 ===============
ie = 0; // 積分の近似計算のための初期値設定(対象に応じて調整)
// 微分の近似計算のための初期値設定
y = get_y(); // 出力を取得
r = get_r(); // 目標値を取得
e_pre = r - y; // 誤差を計算
// メインループ ===============
timer_start(); // 時間の計測を始める関数。timer_now()で計測値取得
while(1){
// 制御周期分だけ待つ処理
while(timer_now() < T); // 制御周期分の時間が経つまで待つ
timer_start(); // 時間の計測を再び0から開始
// 現時刻における情報を取得
y = get_y(); // 出力を取得。例:センサー情報を読み取る処理
r = get_r(); // 目標値を取得。目標値が一定ならその値を代入する
// PID制御の式より、制御入力uを計算
e = r - y; // 誤差を計算
de = (e - e_pre)/T; // 誤差の微分を近似計算
ie = ie + (e + e_pre)*T/2; // 誤差の積分を近似計算
u = KP*e + KI*ie + KD*de; // PID制御の式にそれぞれを代入
// 制御入力をシステムに与える処理
give_u(u); // 例:モーターに電流を流す処理
// 次のために現時刻の情報を記録
e_pre = e;
// 以下、各変数の現在の値を記録する処理を追加するとなおよい
}
以上、PID制御のプログラム例についての解説でした!
コメント
焼芋を作るためのヒーターコントローラを作っています。
疑問①
積分項の積分区間について。
式では0→tですが、グラフとプログラムはt-T→tに見えます。
前者が正しいように思えるのですが。
疑問②
制御周期Tの決め方。
AC100V/50Hzで駆動する芋加熱ヒーターのPWM周期はDuty比の分解能確保のため1Hzに設定しました。計算速度的には余裕がありますが、制御周期をこれより短くすることは有効でしょうか?
疑問①
おっしゃる通り、グラフで示しているのはt-T→t区間の積分値です。
一方、プログラムでは次のようにして0→t区間の積分値を求めています。
—————-
ie = ie + (e + e_pre)*T/2;
ここで、
・右辺のie :前回時刻(つまり0→t-T区間)での積分値
・右辺のie以降:t-T→t区間の積分値(図で表している部分)
なので、両者を足すと0→t区間での積分値が求まる
—————-
記事中の図だけでは誤解を招きやすいですね。
そのあたりの関係が分かりやすいものに変えておこうと思います。
フィードバックいただきありがとうございます。
疑問②
まず質問の意図の確認ですが、
—————-
例えばヒーターを70%のパワーで動かしたい場合、PWM周期が1秒なので「0.7秒ON」→「0.3秒OFF」という動作になる。このとき、PIDの制御周期(つまりさっきの「70%」という目標値を更新する周期)をPWM周期の1秒より短くすることは有効か?
—————-
という理解で良いでしょうか?
PID・PWMがそれぞれどう実装されているか次第ですが、基本的には「有効ではない」が回答となります。PWMの1周期中に目標値がコロコロ変わることになるので、結局PIDで意図した値が実現できないためです。
今回の場合はPWM周期が1秒と長めなので、PWM目標値の更新は上記で言う「0.3秒OFF」が終わった直後であるのが理想です。マイコンのPWM機能のようにPWMそのものがハード的に実装されている場合、PIDとPWMのタイミングを同期させるのはちょっと手間ですが、1秒周期であればPWM機能そのものをメインプログラム内でソフト的に実装すれば、PWM目標値の更新タイミングは比較的容易に指定できると思います。
ただ、PIDの制御周期Tも1秒にすると微分&積分計算の誤差が大きくなるため、もしそれが問題になるなら「PIDの計算自体はPWMより短い周期Tで行うが、それによって導出されたPWM目標値の反映は上記タイミングのみにする」とすればよいかと思います。
ただ、ご検討中の用途であれば、そもそもD・Iの項(=微分&積分計算)自体が不要である気もします。(ここから先はお使いの装置構成にもよりますし、ご存知の上での質問かもしれないので、あくまで参考情報として読んでください。リンクも詳しい理論が気になる場合だけ見ればOKです。)
まずIの項についてですが、これは「温度が目標値に留まるのを邪魔する何らかの作用が働く場合」に必要となります。(※そのあたりの説明はこちらのページをご覧ください)
ヒーターの場合、「外部への放熱」が主な外乱として制御の邪魔をすることになると思います。今、ヒーターが囲ってあるなどある程度の断熱があり、ヒーターによる入熱>>放熱とみなせるのであれば、その放熱は無視してもほとんど問題なくなります。無視できる場合はIの項が無くても問題なく制御できますし、無視できない場合でもPゲインを上げるだけで影響をある程度軽減できます。(※そのあたりの理論的な説明はこちらのページをご覧ください)
よって「最初にIの項なしで試して、定常偏差が問題になればIの項を追加する」というくらいでよいかと思います(Iの項は比較的チューニングが面倒ですし)。
次にDの項ですが、放熱を無視できる場合、システムは積分系に、無視できない場合、システムは1次系のような動作をすると考えられます。(※熱系を積分系としてモデル化した例がこちらにあります。これに抵抗(=放熱)が加わると1次系っぽくなります。)
こちらのページで紹介している通り、積分系も1次系もPID制御でDの項が必要となることはほぼないため、最初はDの項もなしで試すのがよいかと思います。
以上、何かの助けになればと思い長々と書いてしまいましたが、参考になる部分だけ活用していただければと思います。
ご回答ありがとうございます。
疑問①
右辺のieの意味を理解しました。
疑問②
質問の意図はご理解の通りです。
私の懸念は「PIDの制御周期Tも1秒にすると微分&積分計算の誤差が大きくなるため、もしそれが問題になる」かどうかでした。
PWMはArduino又はPICのハードウェアで生成しています。
焼芋マシン以外への流用もしてみたいので、制御周期可変、KI,KDの初期値ゼロで作り、チューニングしてみます。
そうなんですね。少しでも参考になったのであればよかったです。
だいたいの場合、細かいことを考えなくてよくするために「PWMの周期<<PIDの周期」 としますが、そこはヒーターの許容性能しだいですね。
焼芋マシンは面白い題材ですね。成功時のご褒美があるのでモチベーションも上がりそうです。
また不明点が生じましたらご連絡ください。
焼芋マシン、おおむね完成しました。
ヒーター入力に対するレスポンスが悪いため、PWM周期は1秒で支障なく、PID計算周期を1秒より短縮するメリット無しと感じました。
放熱が無視できず、I項はゼロに出来ませんでした。
D項はほぼゼロです。
予熱時はP項がヒーターのDuty比上限の100%を越えて、ヒーターが連続運転になりますが、支障ないようです。
ピザを焼いてみましたが、具の水分の残り具合が外乱として作用するのが面白く、ヒーターのDuty100%で加熱した際、空焚きだと300℃近くに達するのに、水分が多いと200℃程度までしか上がらず、チューニングを楽しめそうです。
おぉ、できましたか!ご報告いただきありがとうございます!
具の水分量が効いてくるとは、すごく面白いですね!やはりやってみないと分からないものですね。勉強になります。
ということは、最終的にはメニューや食材ごとにパラメータを突き詰めていく感じになるのでしょうか。そうなると本格的に調理家電っぽくなりますね!